
Технология 4WS (4 Wheel Steer, 4 управляемых колеса, полноуправляемый автомобиль) — технология, обеспечивающая рулевое управление не только передних колес автомобиля, но и задних. Широко применяется на специальной, строительной и военной технике (многоосные тягачи, длиннобазные трехосные автобусы, военные джипы и т.д.), в серийном легковом автомобилестроении широко применялась только в диапазоне 1987-2001 гг.
4WS преследует три разные цели, достигаемые одним и тем же решением (изменением мгновенного радиуса поворота): получить переменную чувствительность автомобиля к повороту руля («острый руль» в парковочно-маневренных режимах и «длинный руль» в скоростных трассовых режимах); улучшить маневренность в зоне низких («парковочных») скоростей; повысить устойчивость в зоне высоких («трассовых») скоростей.
На автомобилях часто можно встретить маркировку AWD и 4WD. Мы знаем, что это тип полного привода, но в чем разница между ними. All-wheel-drive (AWD) и four-wheel-drive (4WD) системы становятся популярными не только на внедорожниках и паркетниках, но и на обычных седанах.
Несколько лет назад словосочетание «полный привод» говорило о том, что все четыре колеса имеют привод от двигателя, и это способствовало хорошей проходимости по снегу, песку или грязи. Что особенно было актуально для нашей страны, где нет дорог, а присутствуют только направления. Сегодня это словосочетание не столь просто, как было раньше.
В настоящее время стали популярны три системы: AWD, full-time 4WD и part-time 4WD. Хотя каждая система имеет собственные достоинства, они все предоставляют улучшенную управляемость на скользкой поверхности и в условиях бездорожья, но и увеличивают расход топлива, усложняют ходовую часть, увеличивая стоимость прохождения технического обслуживания.
Рart-time 4WD - самая простая, надежная система, которая предоставляет возможность выбора способа привода автомобиля, посредством раздаточной коробки, в зависимости от дорожной ситуации. Главный недостаток такой системы в том, что ее нельзя использовать на сухом асфальте, так как это может привести к повреждениям механизма. Так что основное время приходится использовать 2WD, а когда возникает какая либо неприятность, то подключать 4WD.
В новых моделях, водитель может переключаться между режимами 2WD в 4WD High во время движения, но он должен снизить скорость до минимума или полностью остановится, если захочет включить 4WD Low. 4WD Low-режим обычно используется в экстремальных ситуациях, на песке или глубоком снегу.
Система Full-time 4WD (постоянный полный привод) используется несмотря на дорожные условия. Она имеет ряд преимуществ: у нее нет строгого разграничения от типа дорожной поверхности. Она идеальна для тех, кому часто приходится ездить по скользким или сыпучим поверхностям. Такую же систему ставят на псевдо-спортивные автомобили, для лучшей динамики разгона, управляемости. Но такая система обязательно должна быть снабжена дополнительными блокировками, вроде межколесного и меж-осевого дифференциалов.
All-wheel drive (AWD) похожа на Full-time 4WD тем, что нет необходимости выбирать режим привода в зависимости от дорожной ситуации. За вас это делает бортовой компьютер, который сам анализирует дорожную обстановку в зависимости от угловых скоростей каждого колеса. Автомобиль использует 2WD пока какое-либо из колес не начнет проскальзывать. Если это произошло, то подключается полный привод. Дальше бортовой компьютер сам определяет, на какую ось передать больше-меньше крутящего момента от двигателя. Возможным недостатком этой схемы является необходимость почувствовать момент подключения полного привода, чтоб вас не занесло. Ко всему необходимо привыкать и приноравливаться.
Для того, чтобы заставить робота двигаться плавно по черной линии, нужно заставить его самому считать скорость движения. А чтобы заставить робота считать, необходимо сначала самим определиться, как это делается.
Человек видит черную линию и ее четкую границу, а датчик освещенности работает несколько иначе.
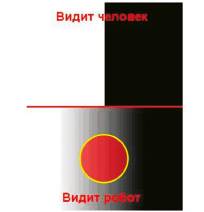
Именно это свойство датчика освещенности – невозможность четко различить границу белого и черного – мы и будем использовать для расчета скорости движения. Во-первых, введем понятие «идеальная точка траектории». Показания датчика освещенности колеблются в диапазоне от 20 до 80, чаще всего на белом цвете показания равны примерно 65, на черном порядка 40. Идеальная точка – условная точка примерно посередине белого и черного цветов, следуя которой робот будет перемещаться вдоль черной линии. Здесь принципиально расположение точки – между белым и черным. Задать ее точно на белом или черном не получится по математическим причинам, почему – будет ясно позднее.
Эмпирическим путем мы вычислили, что идеальную точку можно высчитать по следующей формуле:

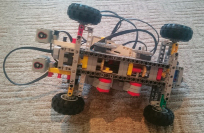
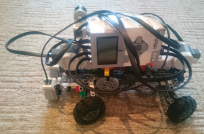
Дальше происходит следующее. Робот должен двигаться строго по идеальной точке. Если случается отклонение в какую-либо сторону, робот должен вернуться к этой точке. В роботе-парковщике стоят вышесказанные технологии (Full-time 4WD, 4WS) и 3 датчика (2 из которых являются датчиками освещенности для езды по линии и 1 инфракрасный датчик для определения места для парковки).
Я планирую реализовать робота-парковщика в более крупных масштабах. Идея такова: возьмем обычную парковку перед торговым центром, и обклеим ее белой линией (т.к асфальт черного цвета) в определенных местах. Возьмем технологии, которые стоят в нашем роботе, и поставим их в обычный автомобиль. Таким образом, человек приезжает в торговый центр оставляет свой автомобиль в указанном месте, уходит за покупками. В этот момент автомобиль едет по линии и ищет себе парковочное место. После этого человек возвращается и в телефоне включает специальное приложение, в котором активирует кнопку возврата, и автомобиль приезжает в отведенное место проезжая по линии.


Библиографическая ссылка
Щукин Ф.П. РОБОТ ПАРКОВЩИК // Международный школьный научный вестник. 2017. № 4. ;URL: https://school-herald.ru/ru/article/view?id=310 (дата обращения: 29.07.2026).