
Космос – это достаточно актуальная и перспективная область применения систем, созданных силами робототехники. Поскольку в космосе присутствует наибольшая концентрация опасных для жизни человека факторов, то решение различных исследовательских задач в условиях космоса невозможно без использования специального оборудования, обеспечивающего безопасную работу человека. Учёные во всём мире работают над созданием универсального робота-астронавта, который смог бы помочь человеку в условиях космоса выполнять всю опасную работу.
Меня заинтересовала такая область робототехники, как космическая робототехника. Это направление в науке, которое занимается разработкой робототехнических систем для решения прикладных задач в сложных условиях космоса, на поверхности безатмосферных космических тел, а также в атмосфере планет земного и неземного типа. Моя работа – первый шаг к созданию человекоподобного робота.
Цель: Познакомиться с основами робототехники и создать программируемого робота.
Этапы:
1. Изучение робототехники, как науки.
2. Знакомство с конструкциями и возможностями известных роботов.
3. Создание робота.
4. Написание алгоритма действий и программирование созданного робота.
5. Экспериментальная проверка возможностей манипулятора H1.
Изучение робототехники, как науки
Робототехника – это наука, которая занимается созданием и применением роботов. Она опирается на электронику, механику, телемеханику, радиотехнику и информатику. Есть несколько видов робототехники: строительная, промышленная, бытовая, авиационная и экстремальная, в которую входят военная, космическая и подводная.
Слово «робототехника» впервые придумал и использовал Айзек Азимов, в своем рассказе «Лжец», в 1941 г.
Знакомство с конструкциями и возможностями известных роботов
Особый интерес у меня вызвали следующие модели роботов:
1. ASIMO: Робот-гуманоид. Один из наиболее человекоподобных роботов, созданный японской компанией Honda в 2000 году. Вес 52 кг, рост 120 см. Робот умеет выполнять повседневные задачи. Также в нем есть ряд дополнительных возможностей для взаимодействия с человеком: распознавание движущихся объектов, поз, жестов, окружающей среды и звуков. Он умеет подниматься по лестнице, а в модели 2005 года ему добавили возможность бегать со скоростью 6 км/ч.

2. BigDog: робот-мул. Робот, с повышенной проходимостью, созданный компанией Boston Dynamics. Он должен был служить солдатам в качестве мула, в местах, не предназначенных для передвижения обычной техники. Вес робота 75 кг, высота 70 см. Он может передвигаться по тяжелой местности со скоростью 5 км/ч и нести на себе груз массой 54 кг.

3. RiSE: карабкающийся робот. Он был создан для карабканья по горизонтальным поверхностям. Весит робот 2 кг, длина его 25 см, бегает со скоростью 1 км/ч. У него 6 лап, на каждой по 2 мотора. Его пятки имеют несколько сменных насадок под каждый тип поверхности. Хвост ему нужен для балансирования. В будущем планируется сделать его пяткам сухой тип прилипания, что даст возможность ползать по отвесным гладким поверхностям, таким как металл или стекло.
Создание робота
Используя полученные знания, я решил создать своего робота или хотя бы его часть. Из имеющегося у меня конструктора Lego Mindstorms я смог создать «руку» манипулятор.

Сборка происходила в несколько стадий:
1. Сборка кисти и предплечья.
2. Сборка локтевого сустава и плеча.
3. Сборка плечевого сустава и посадочного места для программного блока.
4. Изготовление станины для руки.
Готовый продукт получил рабочее название Н1, сокращение от Hand.
Созданный манипулятор имеет два сустава, плечевой и локтевой, и оканчивается кистью.


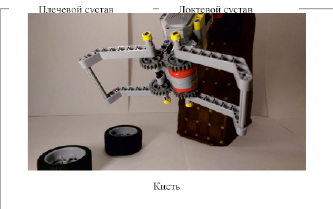
По суставам ось вращения плоская, плечевой сустав вращается вправо-влево, а локтевой, верх-вниз. Кисть имеет пару клешней, и может совершать хватательные действия.
Написание алгоритма действий и программирование созданного робота
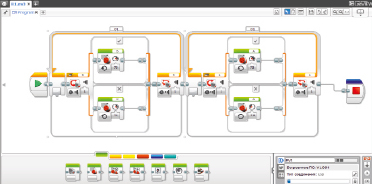
С помощью программного обеспечения EV3 (https://www.lego.com/ru-ru/mindstorms/downloads/download-software), мы написали программу, часть которой выглядит примерно так:
Полный алгоритм работы Н1 представлен в приложении 2 (рис. 1).
Несомненным плюсом данного программного обеспечения является то, что писать программы в нем можно с помощью блок-схем, что очень удобно для начинающих любителей робототехники.
Экспериментальная проверка возможностей созданного манипулятора H1
В результате экспериментов с манипулятором я выяснил, что все действия, предусмотренные мною в алгоритме, выполняются роботом успешно и в полном объёме. Созданный мною манипулятор умеет совершать хватательные действия кистью, может брать лёгкие предметы с любой поверхности в радиусе действия клешней, а затем перемещать их в направлении, выбранном случайным образом.
Заключение
Познакомившись с робототехникой, изучив известных роботов, я из конструктора Lego собрал часть своего будущего робота, руку – манипулятор H1, для которой написал алгоритм действий и проверил выполнение этих действий роботом на практике.
В текущей реализации H1 основной упор был сделан на организацию программных модулей для управления двигателями в отдельных потоках. А также был написан ДЕМО-режим для демонстрации его возможностей на неделе науки в школе, конференции МИФ-2017 и всероссийском конкурсе проектных работ школьников (приложение 1).
В будущем я планирую улучшить конструкцию «руки» манипулятора, построить тело робота, в котором будет установлен программный блок и голову, которая будет произносить предопределенные фразы. То есть создать полноценного презентационного робота с минимальным интеллектом.
Приложение 1

Конференция Миф – 2017

Всероссийский конкурс проектных работ школьников. Апрель 2017
Приложение 2
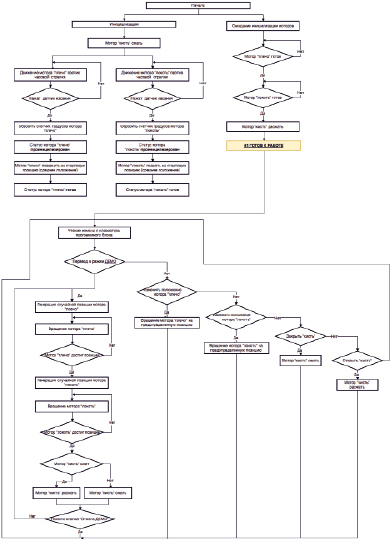
Рис. 1. Алгоритм работы H1
Библиографическая ссылка
Оразов И.В. ПЕРВЫЕ ШАГИ В РОБОТОТЕХНИКУ // Международный школьный научный вестник. – 2018. – № 1. ;URL: https://school-herald.ru/ru/article/view?id=515 (дата обращения: 26.04.2024).