
Известен шагающий механизм и шагающая машина П.Л. Чебышева, которые были показаны на Всемирной выставке в Париже в 1878 году [1, 2]. Пафнутий Львович Чебышев предложил гребной механизм в качестве движителя для лодки [2, 3]. Закономерен вопрос о создании единого, общего движителя для лодки и машины. В моей работе доказаны три факта. Во-первых, П.Л.Чебышев не заметил в своём гребном механизме свойств амфибии, хотя его лодка почти выходила на берег. Во-вторых, П.Л.Чебышев напрасно перенёс прямолинейный участок природной шагающей траектории на гребной механизм, потому что по воде лодка не шагает. В-третьих, даже на прямолинейном участке угол атаки весла изменяется и не равен прямому, что уменьшает силу тяги вёсел.
Цель работы заключается в предложении единого, общего для суши и для воды, движителя лодки-амфибии, основная среда для которой является водной. При таком определении целевого назначения транспортного средства появляется возможность его использования на заболоченной местности, на шугированных водоёмах, на мелководье, на снегу, на затопленных льдах. Для достижения поставленной цели работы было предложено рассмотреть возможность совмещения преимуществ шагающей машины П.Л. Чебышева [1] с гребным механизмом, предложенным этим же автором [3] и упрощением конструкции, предложенным Скворцовой А.А. и Папиашвили Э.Д. [4].
В гребном устройстве П.Л. Чебышева два лямбдаобразных механизма с общим ведущим кривошипом дополнены ещё двумя другими механизмами для обеспечения прямолинейного участка движения механических вёсел, когда те поочерёдно погружаются в воду. Переворот механизма – это патентная новизна предлагаемого устройства [5,6,7,8]. Собранный макет такой комбинации механизмов показал возможность лодки не только плавать, но и передвигаться по отмели [8]. Если сдвоенную пару лямбдаобразных механизмов перевернуть, то непосредственно на концы шатунов можно установить вёсла-опоры, которые могут и грести по воде, и шагать по отмели. Если глубина водоёма большая, то вёсла на концах шатунов гребут по воде. На отмели эти же вёсла с опорами шагают по дну водоёма, пока лодка-амфибия не выйдет на «чистую» воду.
Для иллюстрации работоспособности технического предложения был изготовлен макет гребного механизма с одновременным приданием ему функции опор шагающего механизма [5–11].
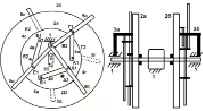
Прогрессом научной работы является разработка и создание макета принципиально нового механизма – шагающего колеса с лямбдаобразными механизмами П.Л.Чебышева [12]. Я предложила, а потом установила на один кривошип шесть лямбдаобразных механизмов П.Л.Чебышева. В традиционной механической схеме корпус механизма неподвижен, а кривошип вращается вокруг корпуса. Я предлагаю обратить движение, поэтому изготовила механизм по роторной схеме, то есть кривошип неподвижно закреплён относительно конструкции лодки-амфибии, но теперь уже подвижный корпус вращается вместе с шестью шарнирно-рычажными лямбдаобразными механизмами П.Л.Чебышева относительно лодки-амфибии. Сдвиг по фазе в работе соседних механизмов равен 60 градусов, когда один механизм уходит из зацепления с поверхностью дна водоёма или контакта весла с водой, на смену ему приходит следующий механизм с началом фазы своей активной работы по перемещению лодки-амфибии. Собранный механизм шагающего колеса и схема его работы показаны на рис. 1.
Основание для выполнения работы
Цель работы заключается в создании эффективного движителя для лодки-амфибии или автомобиля-амфибии, способных передвигаться по суше, воде, отмелям, заболоченным местностям и шуге.
Работа связана с решением актуальной научно-технической проблемы создания транспортного средства для северных областей, промышленное освоение которых постоянно возрастает в последнее время.
Новизна предлагаемого технического решения заключается в совмещении преимуществ колеса, шагающей опоры и весла в едином механизме, режим работы которого переключается в зависимости от окружающих условий.

Рис. 1. Схема работы шагающего колеса
Научно-исследовательская работа проводится в соответствии со Стратегией научно-технологического развития Российской Федерации и соответствует:
большому вызову 15ж (необходимость эффективного освоения и использования пространства, в том числе путем преодоления диспропорций в социально-экономическом развитии территории страны, а также укрепление позиций России в области экономического, научного и военного освоения космического и воздушного пространства, Мирового океана, Арктики и Антарктики), приоритету 20е (связанность территории Российской Федерации за счет создания интеллектуальных транспортных и телекоммуникационных систем, а также занятия и удержания лидерских позиций в создании международных транспортно-логистических систем, освоении и использовании космического и воздушного пространства, Мирового океана, Арктики и Антарктики), ожидаемому результату 36б (повысить качество жизни населения, обеспечить безопасность страны и укрепление позиции России в глобальном рейтинге уровня жизни за счет создания на основе передовых научных исследований востребованных продуктов, товаров и услуг).
Анализ литературы
Первым аналогом служит известный лямбдаобразный механизм русского инженера и учёного Пафнутия Львовича Чебышева [1].
Второй аналог – это система из четырёх лямбдаобразных механизмов. Такую систему механизмов П.Л.Чебышев применил на шагающей машине, которая демонстрировалась на Всемирной выставке в Париже в 1895 году [2]. Для предлагаемого нового технического решения важна идея П.Л. Чебышева о совмещении двух пар лямбдаобразных механизмов с каждой стороны шагающей машины. Синхронизация работы каждой пары лямбдаобразных механизмов выполнена введением дополнительного шатуна, который соединяет ведущие кривошипы этих механизмов, устраняет одну степень свободы в паре механизмов и превращает их в единое устройство.
Описание третьего аналога содержится в книге И.И. Артоболевского и Н.И. Левитского и тоже принадлежит П.Л. Чебышеву. Это гребной механизм для лодки, содержащий два лямбдаобразных механизма на одном общем кривошипе [3]. С технической точки зрения дополнительный шатун в шагающей машине П.Л.Чебышева выродился в единый цилиндрический шарнир сразу для трёх рычагов: общего кривошипа и двух шатунов соседних лямбдаобразных механизмов, развёрнутых друг относительно друга на 1800. В результате разворота шагающие траектории концевых рабочих точек шатунов пересеклись, но шатуны не мешают движению друг друга из-за сдвига по фазе на 1800. Для предлагаемого нового технического решения важен факт возможности вазового сдвига, разворота одного механизма относительно другого.
Комбинация двух пар лямбдаобразных механизмов с общим кривошипом была применена А.А.Скворцовой и Э.Д.Папиашвили для разработки макета шагающей платформы для освоения тундры, Арктики и северных областей [4,5]. На рис. 2 показана схема одного лямбдаобразного механизма и совмещённой пары таких механизмов.
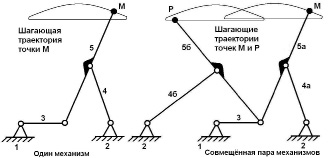
Рис. 2. Схема совмещения лямбдаобразных механизмов
Собственной авторской разработкой служит новое применение известной пары лямбдаобразных механизмов в перевёрнутом виде в качестве единого движителя для лодки-амфибии [6–11]. Это устройство было выбрано в качестве ближайшего аналога, то есть прототипа, для дальнейшего совершенствования. Суть технического решения заключается в перевороте пары лямбдаобразных механизмов с единым кривошипом и в установке на рабочую точку шагающей опоры шатуна весла. Этот механизм-прототип был применён на действующем, испытанном много раз на суше и на воде макете движителя новой лодки-амфибии. Схема механизма, его расположение на лодке-амфибии и фотография показаны на рис.3.
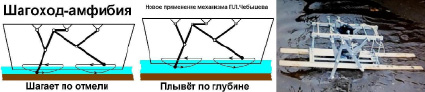
Рис. 3. Авторский испытанный макет лодки-амфибии
Если глубина водоёма большая, то лодка-амфибия движется за счёт работы весла. На отмели опора весла-шатуна упирается в грунт, лодка-амфибия начинает шагать, преодолевая мелководье. Переключать режим работы движителя при переходе с суши в воду и обратно не требуется.
Основным недостатком прототипа является неравномерное движение лодки-амфибии по отмели. Этот недостаток определил основное назначение транспортного средства – лодка. Вспомогательное назначение – амфибия, потому что возможен только кратковременный неравномерный режим шагающего движения по отмели или по суше с большими инерционными нагрузками.
Целью доработки движителя лодки-амфибии было максимальное устранение неравномерности движения транспортного средства с возможностью длительного равномерного движения по суше без дополнительных инерционных нагрузок. Результатом исследования является создание макета принципиально нового механизма – шагающего колеса с лямбдаобразными механизмами П.Л. Чебышева [12].
В основу разработки нового движителя для лодки-амфибии и, как оказалось, для автомобиля-вездехода была положена идея совместной работы нескольких лямбдаобразных механизмов. В аналогах и в прототипе синхронно работают два механизма. Нельзя ли сделать больше? Не просто сделать, а расположить механизмы по кругу на колесе. Получилась идея совмещения преимуществ колеса с достоинствами шагающего механизма.
На основе анализа литературы, изучения аналогов и критики прототипа появилось новое техническое предложение для движителя лодки-амфибии и автомобиля-вездехода – шагающее колесо, или шаг-колесо.
Теоретические основы шагающего колеса
Первым предложением было установить на колесо восемь лямбдаобразных механизмов с общим ведущим кривошипом. От аналогов и прототипа это решение отличается не только количественно, но и качественно. В количественном отношении восемь механизмов труднее расположить на корпусе, чем два механизма, потому что рычаги будут мешать движению друг друга. В качественном отношении сразу было принято решение не разворачивать соседние лямбдаобразные механизмы зеркально, как в аналогах и в прототипе, а выполнить равномерное их размещение в угловом отношении по окружности. Каждый механизм является результатом поворота предыдущего механизма на один и тот же угол без зеркального отображения. В случае восьми механизмов угол между соседними устройствами равен 450. Корпус для расположения восьми лямбдаобразных механизмов был изготовлен и началась сборка всего устройства. Процесс сборки устройства показан на рис. 4.
После установки двух механизмов стало ясно, что третий установить не получится, потому что рычаги мешают движению друг друга. Однако эта трудность не является принципиальной. Вполне возможно изготовить рычаги фигурными, например, в виде дуг. Но сначала надо было обосновать и доказать возможность создания шагающего колеса, пусть даже с меньшим количеством лямбдаобразных мехзанизмов. Первый неудавшийся опыт сборки сразу восьми механизмов на одном колесе окозался очень полезным, потому что сразу определил, что на колесе можно установить три лямбдаобразных механизма с прямолинейными рычагами, не мешающими движению друг друга. С другой стороны колеса тоже можно установить три механизма, поэтому общее число лямбдаобразных механизмов на шагающем колесе будет шесть с шагом фазового сдвига 600.
После определения общей схемы шагающего колеса с шестью механизмами практическая часть работы была приостановлена и началось теоретическое изучение предложенной схемы. На большом листе картона были нарисованы шагающие траектории каждого механизма посредством поворота демонстрационного макета. Эти траектории показаны на рис. 5.
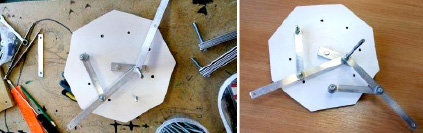
Рис. 4. Процесс сборки механизма шагающего колеса
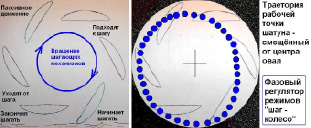
Рис. 5. Рабочие траектории концов шатунов
Теоретическое обоснование работы шагающего колеса свелось к изучению сложного движения концевых рабочих точек шатунов. Рабочие точки совершают сразу два движения. Во-первых, они вращаются вместе с колесом, потому что шагающее колесо изготовлено по роторной схеме. В обычном лямбдаобразном механизме кривошип вращается и приводит в движение коромысло и шатун, а в роторной схеме, наоборот, кривошип закреплён, а корпус вместе с коромыслом и шатуном вращаются вокруг кривошипа. Во-вторых, концевые рабочие точки шатунов совершают шагающее движение П.Л.Чебышева, как в шагающей машине. В результате вращения шагающего колеса одна шагающая траектория подходит к опорной поверхности, обычно к земле, другая шагающая траектория уже взаимодействует с землёй, третья отходит от земли и так далее по роторному принципу.
На большом листе картона с помощью демонстрационного лямбдаобразного механизма были начерчены не только шагающие траектории, но и траектории рабочих концевых рабочих точек шатунов во время вращения колеса. Оказалось, что траектории всех шести концевых рабочих точек шатунов шести лямбдаобразных механизмов представляют собой овал. Центр этого овала не совпадает с центром колеса – это основа изобретения.
При теоретическом изучении шагающего колеса надо учитывать, что по дуге концевая рабочая точка шатуна движется в два раза быстрее, чем по почти прямолинейному отрезку – это принцип шага. Такое распределение скорости рабочей точки вдоль траектории очень хорошо соответствует движению по воде, если на концы шатунов установить вёсла. Схема движения транспортного средства и его модели в режиме «лодка-амфибия» показана на рис. 6.

Рис. 6. Схема движения шагающего колеса в воде
На дуге скорость весла будет в два раза больше, чем на отрезке. Сила сопротивления движению весла в воде, то ест сила тяги вёсел, увеличится в 4 раза. Если большая сила тяги не нужна, то площадь весла на шатуне можно уменьшить для снижения ударной нагрузки конструкции о воду в соответствие с целью работы.
Дальнейшее теоретическое изучение принципа действия шагающего колеса проводилось пока не в гидродинамическом, а в механическом направлении. Смещённая от центра овальная траектория привела к идее фазового переключения режима движения шагающего колеса. Шагающее колесо может и катиться, как на обычном автомобиле, и шагать подобно шагающей машине П.Л. Чебышева, но не так равномерно, как на устройстве знаменитого русского инженера. Суть двух режимов движения шагающего колеса поясняется смещённой нецентральной траекторией всех концевых рабочих точек шатунов лямбдаобразных механизмов, вращающихся вместе с колесом по роторному принципу. Смещение центра овальной траектории опорной точки рычага относительно центра окружности позволяет либо «прятать» часть овальной траектории в круге колеса, либо «выдвигать» другую часть овальной траектории из круга колеса простым фазовым разворотом всего шагающего колеса. Фазовый разворот предполагает поворот на 1800 корпуса шагающего колеса. Но на корпусе шагающего колеса неподвижно закреплён кривошип лямбдаобразного механизма. Следовательно, корпус шагающего колеса остаётся основой, как у автомобиля, а кривошип разворачивается относительно корпуса на 1800, как, например, стояночный тормоз автомобиля. На рис.7 показана геометрическая основа поэтапного проектирования шагающего колеса и дальнейшей его работы в различных режимах на суше и на воде с вёслами.
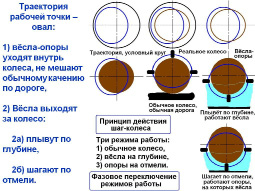
Рис. 7. Геометрическое и механическое проектирование шагающего колеса
Сначала вычерчивается условная окружность произвольного радиуса, близкого к размерам лямбдаобразных механизмов. Удобнее эту окружность сделать больше, чтобы овальная траектория концевых рабочих точек всех шатунов размещалась внутри этой условной окружности. По сути условная окружность – это колесо неизвестного пока радиуса. Затем строится окружность реального колеса так, чтобы центры условной и реальной окружностей совпадали, часть овала слева от вертикальной оси симметрии выступала за реальную окружность, а часть овала справа от реальной окружности находилась внутри реальной окружности. Потом условная окружность стирается, она больше не нужна. По реальной окружности выпиливается колесо нового механизма, на котором будут располагаться лямбдаобразные механизмы П.Л. Чебышева. Геометрическое проектирование шагающего колеса выполнено. Если шагающее колесо посредством разворота с последующей фиксацией кривошипа повернуть относительно корпуса транспортного средства так, что снизу будет часть овала, «затенённая» колесом, то шагающее колесо будет всё время катиться как на обычном автомобиле. В этом случае концевые рабочие точки шатунов лямбдаобразных механизмов, вращающихся вместе с колесом по роторному принципу, никогда не будут касаться поверхности земли, будут находиться всё время выше опорной поверхности. Это сколь угодно режим качения шагающего колеса без ударных нагрузок. На концы шатунов можно установить вёсла, тогда автомобиль превратится в амфибию. Режим качения не нужно выключать при движении по воде, если вход и выход из воды происходят на твёрдую опорную поверхность. Это всё равно что на спицы велосипеда установить вёсла и частично погрузить колесо в воду. Однако опорная поверхность может оказаться скользкой, болотисной, снежной, ледяной, вязкой и т.д. Тогда начнётся пробуксовка автомобиля, хорошо знакомая автомобилистам. В этом случае надо включить кратковременный режим работы «шаг» шагающего колеса. Для этого достаточно рукоятку закреплённого на корпусе кривошипа освободить от фиксации, повернуть на 180° и опять закрепить. Овальная траектория концевых рабочих точек всех лямбдаобразных механизмов шагающего колеса повернётся на 180°. При этом «затенённый» колесом участок траектории будет находиться над колесом, а выступающая часть овала расположится под колесом. Это означает, что концевые рабочие точки шатунов станут упираться в опорную поверхность, то есть в дорогу, приподнимут колесо вместе с автомобилем, и автомобиль начнёт шагать на шатунах лямбдаобразных механизмов. Шагающий режим движения шагающего колеса является экстренным, включается кратковременно только для преодоления плохого участка дороги. Шагающий режим приводит к дополнительным ударным нагрузкам. Однако величина ударных нагрузок определяется количеством лямбдаобразных механизмов на шагающем колесе. При бесконечно большом количестве лямбдаобразных механизмов на шагающем колесе ударные нагрузки стремятся к нулю, а шагающая траектория опоры становится практически идеальной, как у стопы человека или копыта животного. Экстренный шагающий режим работы шагающего колеса может включаться не только на суше для автомобиля-вездехода, но и на воде для автомобиля-амфибии для преодоления размытых отмелей, когда обычное колесо начинает на таких отмелях пробуксовывать.
Таким образом, теоретически доказана возможность создания шагающего колеса и применения его на автомобилях-вездеходах и автомобилях-амфибиях.
Испытание модели с шагающим колесом
Первым авторским предложением является установка на один кривошип системы из шести лямбдаобразных механизмов П.Л. Чебышева. В традиционной механической схеме корпус механизма неподвижен, а кривошип вращается вокруг корпуса. Второе авторское предложение состоит в обращении движения, то есть в работе механизма по роторной схеме. Кривошип неподвижно закреплён относительно конструкции лодки-амфибии, но теперь уже подвижный корпус вращается вместе с шестью шарнирно-рычажными лямбдаобразными механизмами П.Л. Чебышева относительно лодки-амфибии. Сдвиг по фазе в работе соседних механизмов равен 60 градусов, когда один механизм уходит из зацепления с поверхностью дна водоёма или контакта весла с водой, на смену ему приходит следующий механизм с началом фазы своей активной работы по перемещению лодки-амфибии.
Роторная схема работы движителя позволяет реализовать три режима работы в едином устройстве: равномерное движение лодки-амфибии по суше, ничем не отличающееся от автомобильного принципа, движение по воде за счёт работы вёсел и движение по отмели, болоту, шуге, снегу шагаюшим способом с опорой на концы шатунов, на которые установлены вёсла. Шагающий способ перемещения кратковременно включается в крайнем случае только для преодоления препятствия, а потом переключается на длительные режимы движения по воде с помощью вёсел или по твёрдой поверхности на колёсах.
Фазовое переключение оказалось возможным из-за нецентральной овальной траектории рабочих концевых точек шатуна-опоры-весла лямбдаобразного механизма П.Л. Чебышева. Движитель построен по роторному типу, поэтому лямбдаобразные механизмы вращаются при закреплённом на корпусе кривошипе. Концевая рабочая точка шатуна-весла-опоры совершает сразу два движения: по шагающей траектории и по окружности. В результате рабочая точка находится либо постоянно внутри окружности колеса-опоры, либо вне окружности. Если кривошип закрепить так, что нижняя часть колеса касается поверхности, то получится обычный автомобильный принцип движения. Если кривошип на корпусе развернуть, то система тоже повернётся, произойдёт фазовый сдвиг, шатуны-вёсла-опоры выйдут за границу колеса и начнут интенсивнее отбрасывать воду или шагать по отмели. Фазовое переключение режима движения шагающего колеса показано на рис.8.
Общий вид собранного устройства показан на рис. 9.
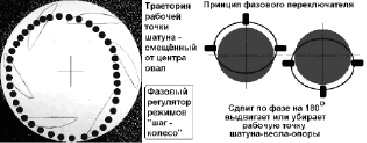
Рис. 8. Фазовое переключение режима движения поворотом рычага

Рис. 9. Общий вид действующего макета с шагающим колесом
Заключение
1. Найдено новое применение известному механизму П.Л. Чебышева в качестве движителя лодки-амфибии как перспективного транспортного средства, особенно для освоения северных районов.
2. Доказана возможность создания лодки-амфибии с новым движителем.
3. Предложен и собран новый механизм – шагающее колесо с лямбдаобразными механизмами П.Л. Чебышева [14–17].
4. Правильность полученных научных выводов и результатов подтверждена экспериментально испытанием действующего макета движителя.
5. Подана заявка на патент на изобретение «Шагающее колесо» [13].
Приложение
Заявка на патент на изобретение (схема и формула изобретения) F16H ШАГАЮЩЕЕ КОЛЕСО
Формула изобретения
Шагающее колесо, состоящее из корпуса, колёсной пары и нескольких лямбдаобразных механизмов, отличающееся тем, что, с целью расширения условий применения, механизм выполнен по роторной схеме с радиусом колёс больше минимального удаления концевых точек шатунов от оси вращения, но меньше максимального удаления концевых точек шатунов от оси вращения, с вращением колёсной пары вместе с шарнирно закреплёнными на колёсной паре лямбдаобразными механизмами, равномерно распределёнными по кругу, при закреплённом на неподвижном корпусе кривошипе с возможностью фиксации кривошипа в различных положениях относительно корпуса.
Библиографическая ссылка
Жукова В.С. ШАГАЮЩЕЕ КОЛЕСО // Международный школьный научный вестник. 2019. № 1-3. ;URL: https://school-herald.ru/ru/article/view?id=903 (дата обращения: 15.02.2026).