
В настоящее время информация играет гораздо большую роль в жизни любой компании или государственной организации, чем пару десятков лет назад. Кто владеет информацией, тот владеет миром, а кто владеет чужой информацией, тот гораздо лучше подготовлен к конкурентной борьбе, чем его соперники.
По оценкам ведущей российской компании в области информационной безопасности PositiveTechnologies, в 75 % случаев внутреннюю компьютерную сеть компании можно скомпрометировать путем атак на беспроводные сети и Wi-Fi точки доступа, полученные в результате неправильной конфигурации сети и действий сотрудников.При этом, каждый шестой сотрудник, используя такую точку, подвергает корпоративную инфраструктуру риску вирусного заражения.
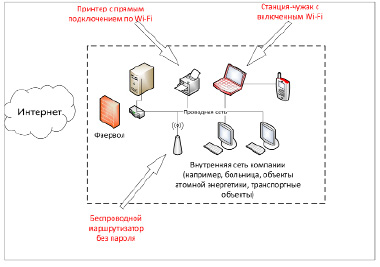
Так, опасными элементами сети, использующими Wi-Fi, могут являться личный ноутбук с включенным Wi-Fi, беспроводной маршрутизатор, принтер с отправкой на печать через Wi-Fiи различные другие.Каждая из таких уязвимостей потенциально может привести к проникновению злоумышленника во внутреннюю сеть.
Стандарт Wi-Fi разработан на основе IEEE 802.11 (англ. InstituteofElectricalandElectronicsEngineers), используется для широкополосных беспроводных сетей связи.
Изначально технология Wi-Fi была ориентирована на организацию точек быстрого доступа в Интернет (hotspot) для мобильных пользователей. Преимущества беспроводного доступа очевидны, а технология Wi-Fi изначально стала стандартом, которого придерживаются производители мобильных устройств. Постепенно сети Wi-Fi стали использовать малые и крупные офисы для организации внутренних сетей и подсетей, а операторы создавать собственную инфраструктуру предоставления беспроводного доступа в Интернет на основе технологии Wi-Fi. Таким образом в настоящее время сети Wi-Fi распространены повсеместно и зачастую имеют зоны покрытия целых районов города.
С точки зрения безопасности следует учитывать не только угрозы, свойственные проводным сетям, но также и среду передачи сигнала. В беспроводных сетях получить доступ к передаваемой информации намного проще, чем в проводных сетях, равно как и повлиять на канал передачи данных. Достаточно поместить соответствующее устройство в зоне действия сети.
Угрозы информационной безопасности, возникающие при использовании сетей Wi-Fi, можно условно разделить на два класса:
• прямые – угрозы информационной безопасности, возникающие при передаче информации по беспроводному интерфейсу IEEE 802.11;
• косвенные – угрозы, связанные с наличием на объекте и рядом с объектом большого количества Wi-Fi-сетей.
По результатам проведенных исследований, в той или иной степени уязвимы практически все информационные сети, имеющие выходы во внешние сети.
Одним из примеров может служить объекты атомной энергетики. Так, несколько лет назад атомные станции в Иране подверглись компьютерной атаке с помощью вируса. Если на таких объектах сотрудники начинают использовать незащищенные беспроводные сети, то это серьезная проблема безопасности. Злоумышленники могут воспользоваться этим и нанести вред внутреннейкомпьютерной сети.
Другим пример – вся территория аэропорта Домодедово, за исключением взлетно-посадочных полос, охвачена «технологическим Wi-Fi». Доступ к нему имеют только сотрудники аэропорта, и в целях авиационной безопасности необходимо своевременно обнаруживать попытки несанкционированного доступа к нему.
Учитывая, что сегодня объекты применения беспроводных сетей могут достигать очень большой площади и протяженности (например, объекты энергетического комплекса, газораспределительные пункты, авиационные и морские порты, крупные производственные объекты), для анализа уязвимости таких сетей можно использовать беспилотную авиацию.
Отрасль экономики, связанная с беспилотными летательными аппаратами, развивается высокими темпами. Еще вчера летающие роботы воспринимались как научная фантастика, то уже сейчас их можно встретить практически во всех сферах жизни человека.
Сфера применения беспилотных летательных аппаратов начинается от военного применения (разведка, сбор информации, огневое поражение, эвакуация раненых) и заканчивается доставкой грузов, аэрофотосъемкой, мониторингом состояния окружающей среды.
Например, в одной из прошлых работ мной был предложен способ измерения радиационного фона земли в труднопроходимых и радиационно загрязненных местностях при помощи тяжелого мультикоптера.
При этом, зачастую легкие беспилотникики – мультикоптеры могут применяться в незаконных целях, например:
• Незаконная аэрофотосъемка;
• Доставка взрывных устройств;
• Незаконная транспортировка запрещенных веществ .и т. д.
Зачастую, управление такими беспилотниками осуществляется с помощью пультов управления, работающих на частотах беспроводной сети Wi-Fi, которая является небезопасным способом передачи данных.
Кроме того, автоматизированное составление карты беспроводных сетей может помочь при различных технических (определение наиболее радиозагруженных мест, где может происходить глушение сигнала) и гуманитарных исследованиях (например, количество беспроводных точек доступа как показатель технологического уровня развития района города).
Цели и задачи исследования
Цель исследования – разработать комплекс с беспилотным летательным аппаратом, способным во время полета производить автоматизированный поиск беспроводных точек доступа Wi-Fi, а также создавать мобильную точку доступа для обеспечения мобильным интернетом труднодоступных районов (гражданское назначение) и информационного противоборства в локальных вооруженных конфликтах.
Задачи исследования –
Разработать и обосновать применимость комплекса обнаружения беспроводных сетей на базе беспилотного летательного аппарата, разработать специализированное программное обеспечение для полезной нагрузки, спроектировать многофункциональный комплекс с БЛА взлетным весом до 2 килограмм, проработать вопросы организации планирования пути на наземной станции управления.
При создании комплекса были проанализированы существующие способы обнаружения беспроводных сетей. По результатам анализа использование беспилотного летательного аппарата было признано оптимальным для быстрого обнаружения точек доступа. Далее были использованы экспериментальные методы исследования (подбор конструкторских решений и весовых характеристик БЛА), а также методы компьютерного трехмерного моделирования в среде AutodeskAutoCAD. Для разработки программного обеспечения полезной нагрузки использован язык программирования Python 2.7.
Во второй части работы на базе устройств, находящихся в открытой продаже собран макет беспилотника, способного проводить анализ беспроводных Wi-fi сетей. Кроме того, разработан макет программного обеспечения наземной станции управления для планирования применения БЛА с алгоритмом поиска пути на графе. Этот алгоритм является базовым для решения задач планирования пути и может использоваться не только для решения задач поиска беспроводных сетей.
Начальный вид комплекса
Таким образом, состав нашего комплекса примет следующий вид:
Сам беспилотник (квадрокоптер)
Пульт управления дроном (планшет)
Полезная нагрузка (специальный микрокомпьютер, размещаемый на дроне и ищущий сети)
Ноутбук для обработки найденных сетей
Дополнительные средства (запасные батарейки, кейсы для переноски)

Первая составляющая комплекса – это сам беспилотник. В нашем случае используется квадрокоптер фирмы ParrotArDrone 2.0
КвадрокоптерParrotAR.Drone 2.0 оснащен 4 моторами мощностью 14.5 Вт и выдающих частоту вращения 28 500 оборотов в минуту. В редукторе используются бронзовые самосмазывающиеся подшипники. На контроллере каждого мотора используется 8 микроконтроллеров, а сам контроллер влагоустойчив. Максимальная скорость полета – 18 км/ч.
На борту квадрокоптера установлены 2 видеокамеры:
Фронтальная HD камера выдает 720p, 30 fps с углом объектива в 92 градуса.
Нижняя QVGA камера (320х240), 60 fps с углом объектива 64 градуса. Бортовое оборудование квадрокоптера составляет 1GHz ARM Cortex A8 процессор, 1Гб DDR2 RAM на 200MHz. Бортовая операционная система Linux 2.6.32. Соединение с «пультом» управления происходит по WiFi.
Ориентация в пространстве происходит за счет 3-осевого гироскопа, 3-осевого акселерометра, 3-осевого магнитометра (магнитный компас), датчика давления и ультразвукового высотомера (на самом деле дальномера).
Максимальная нагрузка, которую может поднять квадрокоптер, составляет 400 грамм.
С одной стороны, не так много, но вполне достаточно для размещения на квадрокоптере одноплатного микрокомпьютера. Сейчас существует много вариантов таких плат, мы остановим свой выбор на RaspberryPi 3.
Сегодня это самый распространенный и мощный одноплатник на рынке, позволяющий решать большое количество задач. А сейчас для решения задачи поиска и сбора информации о беспроводных сетях необходимо подготовить соответствующее программное обеспечение и установить его в Raspberry.
Разработка ПО
На Raspberry могут устанавливаться несколько операционных систем, основанных на базовой ОС Линукс (семейство бесплатных операционных систем).
Самая распространенная ОС – версия Raspbian, она предназначена для домашнего использования.
Для решения задачи поиска беспроводных сетей напишем скрипт на интерпретируемом языке программирования Python. Особенностью и одним из главных преимуществ используемого в работе микрокомпьютера Raspberry является то, что он отлично подходит для программирования на этом языке, и большинство проектов основано именно на нем.
В текущей версии микрокомпьютера (сейчас уже третья версия) наконец появился адаптер беспроводных сетей, распаянный на самой плате. Раньше для доступа к сетям было необходимо дополнительноеоборудование.
На данный момент программа довольно проста. Сначала осуществляется поиск беспроводных сетей и сбор основной информации о них. Затем их названия сохраняются в текстовый файл на флеш-карту (или по любому другому адресу) и с помощью специальных библиотек отправляется на электронную почту письмом с вложением (при наличии соединения).Для правильной работы скрипта мы прописали его в автозагрузку raspberry.
Для корректной работы программы на питоне необходимо скачать и установить дополнительную библиотеку. В линукс подобных системах это делается стандартной командой #sudopipinstallwifi
Работа этой библиотеки выглядит так:
# wifi scan
-61 SomeNetprotected
-62 SomeOtherNet unprotected
-78 zxy-12345 protected
-86 TP-LINK_CB1676 protected
# -*- coding: utf-8 -*-
# -*- Скрипт для работы на raspberrypi -*-
# -*- и ardrone 2 для сканирования wifi -*-
import wifi
import time
import shutil
import os
#----------------------------------------------------------------------
# -*-i = 1
# -*-while i < 10:
# -*-print(i)
time.sleep (15)
def Search():
wifilist = []
cells = wifi.Cell.all(‘wlan0’)
for cell in cells:
wifilist.append(cell)
return wifilist
# -*-print wifilist[]
# -*-i = i + 1
f = open («/home/pi/mywificellprog/wificells.txt», «w»)
qqq = Search()
for i in qqq:
# f.write («\n».join(cells).join(«\n»))
f.write(« %s \n» %(i))
# -*-sleep (5)
f.close()
shutil.copy(‘/home/pi/mywificellprog/wificells.txt’, ‘/media/pi/ADATA/wificells.txt’)
Работа скрипта заключается в следующем.
В начале импортируются необходимые для работы библиотеки – wifi(для работы с беспроводными сетями), time (для работы с системным временем) и shutil(работа с командной строкой).
Затем осуществляется поиск точек доступа, к которым может подключиться встроенный приемник wifiи полученный список записывается в массив.
Далее элементы массива циклом записываются в текстовый файл и переписываются на флеш карту, которую в последующем можно отсоединить и просмотреть содержимое файла на отдельном ноутбуке.
В конце программы текстовый файл
Для правильной работы скрипта мы прописали его в автозагрузку raspberry. Скрипт записывается в файл автозагрузки Raspberry командой sudoleafpad /etc/rc.local
В открывшийся файл rc.local добавляется строчка sudopython /home/pi/mywificellprog/mywificell.py&
При этом у файла скрипта были изменены параметры запуска и установлены необходимые права на его запуск.
После этого скрипт поиска точек wifi запускается автоматически после включения питания платы, записывает найденные точки в txt файл и копирует на флеш-карту.
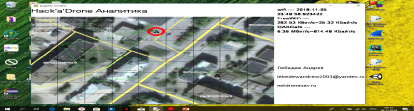
Было разработано по для наземной станции управления, выполняющее задачи планирования пути и анализа полученных после работы микрокомпьютера данных. Скрипт, написанный на языке программирования питон строит оптимальный маршрут для беспилотника на карте с помощью алгоритма дейкстры, затем считывает данные работы платы на каждой из этих точек и выводит их на экран. Скриншот работы программы вы можете увидеть на слайде, а с ней в действии при желании после окончания моего доклада.
Расчет тяжелого мультикоптера
Рассмотренный выше комплекс с БЛА, как уже говорилось, построен на основе коммерческого квадрокоптера с низкой грузоподъемностью, предназначенного для развлекательных целей.
Для решения задач радиомониторинга, а также создания многофункционального комплекса, спроектируем тяжелый беспилотный летательный аппарат мультикоптерного типа, способный нести нагрузку в несколько килограмм.
Исходные данные для проектирования – масса полезной нагрузки 2 килограмма, длительность полета не менее 40 минут.
Для обеспечения вертикального взлета необходимо уравновесить вес мультикоптера и силу сопротивления подъемной силой, создаваемой пропеллерами и тягой электродвигателя.
Взлетный вес нашего беспилотника составляет вес полезной нагрузки, бортового оборудования, винтомоторной группы, рамы и корпуса.
Сформируем массовую сводку. Данные по массе составных частей мы возьмем из справочника по комплектующим для дронов.
|
Агрегат |
Масса, гр х количество |
|
Электродвигатель |
50 х 8 |
|
Воздушный винт |
4 х 8 |
|
Луч (вместе с винтом, регулятором и двигателем) |
320 гр |
|
Аккумулятор, LiPoна 8000 миллиАмперчасов |
215 |
|
Рама |
500 г |
|
Бортовое оборудование и полезная нагрузка |
1000 г |
|
Общая масса |
= (320 х 8) + 500 + 1000 + 215 х 6 5 350 г |
Найдем тягу используемых двигателей, предполагаемый вес беспилотника, силу лобового сопротивления. После подстановки значений во все формулы мы понимаем, что основное равенство (тяга должна уравновесить сумму лобового сопротивления и общего веса) не выполняется и требуется замена двигателей на более мощные.
На первом этапе взлетный вес нашего прототипа составил 5,35 кг (для обеспечения полета было взято 6 литий-полимерных аккумуляторов).
Для уравновешивания взлетного веса необходимы винтомоторные группы (винт и электродвигатель).
Тягу винта можно рассчитать по формуле
T=α(Λ)ρn2D4,
где ρ – плотность возхдуха; D – диаметр винта; n – частота вращения винта; α(λ) – табличный коэффициент тяги (аэродинамическая характеристика пропеллера)
Рассчитаем тягу одного винта у поверхности Земли (ρ = 1,226 кг/м3) для коптера с пропеллерами APC 12×45MR (D = 0,305 м, λопт = 0,4517; α(λопт) = 0,03487) по формуле
T=0,03487∙1,226(10000/60)2∙0,3054=10,275 Н
При равномерном полете (пренебрегаем ускорением) вертикально вверх тяга пропеллеров должна уравновесить вес летательного аппарата G и силу лобового сопротивления Fy
zT=G+ Fy
z – количество винтов [8].
Fy высчитывается по формуле
 ,
,
Cy – коэффициент лобового сопротивления приполете вверх (обычно так обозначают коэффициент подъемной силыкрыла, но поскольку крыльев у мультикоптера нет, а речь идет овертикальном полете (по оси y), такое обозначение здесь, оправданно); S – характерная площадь (для нашего случая площадь по чертежу составит 2 кв. метра).В расчетах можно использовать площадь мультикоптера в плане(без учета пропеллеров) и соответствующий коэффициент Cy илиплощадь и коэффициент Cy эквивалентной по сопротивлениюпластины. Примем второй подход, рассматривая эквивалентнуюкруглую плоскую пластину, для которой Cy = 1,16.
Скорость вертикального подъема примем 5 метров в секунду.
Таким образом, подставляя в уравнение расчета силы сопротивления получим:
 кг м/c2 (Н).
кг м/c2 (Н).
Подставляя в уравнение равновесия получим:
zT=G+ Fy=52,43 + 35,54 = 87,97.
При рассчитанной ранее тяге в 10,275 Н уравнение не выполняется. Таким образом, необходимо либо снижать вес, либо уменьшать лобовое сопротивление, либо увеличивать тягу.
Существующие электродвигатели позволяют увеличить скорость вращения винта более 12 000 оборотов в минуту.Таким образом, тяга после увеличения скорости вращения винта составит 14,8 Н, а суммарная тяга 8 пропеллеров – 118,7 Н, что удовлетворяет уравнению равновесия.
Для более точного подбора параметров беспилотника можно воспользоваться онлайн калькулятором характеристик мультикоптеров, полученные результаты коррелируют с полученными в ходе расчетов.
Использование такого калькулятора также позволяет оценить длительность полета дрона, а также подобрать электродвигатели и пропеллеры.
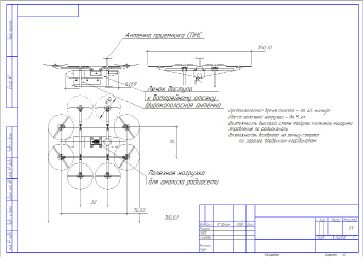
В результате полученных расчетов в инженерном пакете Компас-3Д был разработан чертеж общего вида октокоптера. Заданные ранее условия по полезной нагрузке несколько занижены, но 1 килограмма достаточно для выполнения задач по предназначению.
Дальнейшее развитие комплекса
В дальнейшем планируется:
1. Подключение SSH модема для наблюдения работы ПО в реальном времени;
2. Подключение к Raspberry различных плат расширения и различной аппаратуры;
3. Создание специальных программ для наземной станции управления.
4. Последняя задача уже выполнена.
Выводы
В результате работы был создан комплекс с беспилотным летательным аппаратом-квадрокоптером и микрокомпьютером RaspberryPiдля поиска беспроводных сетей. Система позволяет в автоматическом режиме проводить поиск беспроводных сетей, используя в качестве носителя беспилотный летательный аппарат.
Реализованная в ArDrone программно-аппаратная начинка может быть усовершенствована в самых разных направлениях.
Используемый в работе квадрокоптер ArDrone – начального уровня и может использоваться в качестве лабораторного прототипа, для серьезных исследований необходим дрон с увеличенной грузоподъемностью и временем полета. Достичь необходимых показателей (например, полет в течении 40 минут), можно используя, например, более емкие аккумуляторы.
Таким образом, применение разработанного комплекса с беспилотным летательным аппаратом позволит повысить защищенность важных объектов инфраструктуры исследуя беспроводные сети внутри и вокруг них и находя потенциальных нарушителей, которые их создали. Использование БЛА может упростить процесс поиска небезопасных беспроводных сетей, точек выхода в сеть через портативные устройства.
Второй вариант исполнения комплекса с питанием с наземной станции по кабель-тросу позволяет обеспечивать интернетом и раздавать Wi-Fiв труднодоступных местах, а также ретранслировать сигнал, что позволяет увеличить зону обслуживания.
Библиографическая ссылка
Лебедев А.И. РАЗРАБОТКА КОМПЛЕКСА С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ДЛЯ ПОИСКА БЕСПРОВОДНЫХ СЕТЕЙ // Международный школьный научный вестник. 2019. № 1-3. ;URL: https://school-herald.ru/ru/article/view?id=904 (дата обращения: 13.07.2026).