
Введение.
Использование пищевых роботов и автоматизации в пищевой промышленности значительно ускоряет процесс производства продуктов питания [1]. Роботизированный труд является более экономически выгодным и эффективным по сравнению с ручным трудом, что позволяет ускорить производство пищевых продуктов. Эти пищевые роботы могут быть размещены в общественных местах [2], перераспределяя нагрузку на системы питания и удовлетворяя потребности большего числа людей. Данный проект сосредоточен на создании робота-кондитера, способного приготовить тортики по заказу пользователей.
Текущее состояние проблемы - существующие линии производства сосредоточены на стандартных тортах, а пищевые автоматы предлагают ограниченные варианты настройки [3, 4, 5]. Отсюда получаем - высокие затраты и длительные сроки изготовления тортов по индивидуальным заказам в традиционных кондитерских.
Актуальность:
· Высокий спрос на торты
· Преимущества роботизации
· Увеличение скорости производства
Цель. Разработать робота, способного готовить торты с использованием доступных ингредиентов и соответствующего требованиям клиента.
Задачи:
- Исследовать существующие решения, разработать прототип и проанализировать его производительность
- Создать 3D модель конструкции с использованием программного обеспечения CAD
- Изготовить детали и собрать робота
- Написать программу и отладить робота
Продукт: CakeBot с приложением для управления на платформе Android
Методы: исследование, сравнение, эксперимент, анализ, синтез, систематизация.
Особенности получившейся модели заключаются в том, что:
1) Прототип системы включает в себя манипуляторную руку для обработки тортов.
2) Разработка включает в себя, в качестве улучшения, робота-хранителя (рис.1) для хранения тортов.

Рисунок 1 – Робот-накопитель (хранитель)
3) Разработан робот-художник (рис.2) для украшений и начинок.
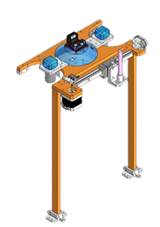
Рисунок 2 – Робот-художник
4) Продумана система транспортировки для перемещения продукта в системе.
Система использует прошивку GRBL для Arduino UNO с CNC Shield, шаговые двигатели Nema17 4401, ременные приводы и трапецеидальные винты. Модуль ESP32 обеспечивает Wi-Fi связь для удаленного управления через приложение на Android [6]. Приложение включает пользовательский и административный разделы для настройки заказа и прямого управления системой. Был построен макет конечной модели (рисунок 3).
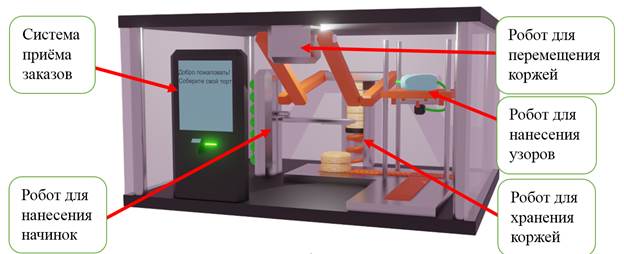
Рисунок 3 – Визуализация конечной модели
Результат.
Был разработан робот-кондитер. Он успешно выполняет задачи, создано удобное приложением для управления. В процессе разработки появились новые идеи для доработки робота, благодаря которым можно реализовать все поставленные задачи.
Заключение.
В результате проделанной работы поставленная цель была достигнута, задачи выполнены. Создан робот, способный собирать торты по заказу покупателя на основе имеющихся ингредиентов. В процессе разработки выявлены незначительные недостатки некоторых систем проекта, которые в процессе изготовления и отладки были исправлены, что позволило довести систему до рабочего состояния.
В ходе работы были получены навыки создания чертежей и спецификаций к системам согласно ГОСТам, изучена теория решения изобретательских задач.