
Актуальность исследования: промышленный робот–сортировщик в настоящее время необходим для замены человеческого труда. При применении робота производительность труда повышается, так как робот-сортировщик может выполнять необходимые действия быстрее и точнее человека, При правильном выборе роботизированной системы производительность возрастает во много раз по сравнению с ручным производством.
Заменяя человека, робот-сортировщик значительно уменьшает затраты производства. С применением робота на производстве необходим лишь оператор, контролирующий данный процесс. Исключение человеческого фактора приводит к уменьшению различных технических ошибок. Именно роботы способны выполнять действия быстро, безошибочно и без устали. Это позволяет заменить человека на монотонных и тяжелых работах, увеличить производительность труда, повысить качество работы, добиться экономии материалов и энергии.
Проблема. На складах много тяжёлых грузов, которые человек не может быстро отсортировать. Для этого он тратит много времени и усилий. Чтобы быстро и безошибочно совершать данные операции, необходимо создать робота-сортировщика, способного облегчить работу человека.
Цель работы: Сконструировать и запрограммировать робота-сортировщика для складских работ.
Задачи:
1) Провести анализ существующих конструкций роботов-сортировщиков. Выявить их плюсы и минусы.
2) Выполнить моделирование электрической части робота.
3) Выполнить моделирование механики робота-сортировщика.
4) Программирование робота.
5) Испытание робота.
Гипотеза. Можно создать робототехническое устройство на базе Ардуино, который сможет заменить человека.
Предмет исследования: робот-сортировщик, приводимый в действие определенными командами.
Методы исследования: теоретический и практический. Теоретический метод: изучение научной-популярной литературы и материал сайтов Интернет. Практический метод: проектирование, конструирование, программирование робототехнического устройства
Обзор литературы по данной теме
Цель данной литературы:
– Обучить основам программирования и составления алгоритмов.
– Обучить проектированию роботов и программированию их действий.
– Через разработку собственных проектов доказать пользу применения роботов в нашей жизни.
– Развивать умение работать с компьютерными программами.
– Обучить техническому моделированию, сборке и программированию роботов.
Продукт исследования: робот должен двигаться на колесной паре. На роботе должно быть размещены датчики, которые выполняют различные функции, параметры которых устанавливаются при помощи программного обеспечения. Робот должен выполнять все заложенные функции автономно. Робот должен двигаться по линии, захватывать объект и переносить его в определенное место. Робот должен находить, определять местонахождение необходимого товара, поднимать и переносить объект в определенное место.
Робот – это автоматическое устройство, которое частично или полностью заменяет человека при выполнении работ. Мы выяснили, что робототехническое устройство работает согласно заложенным командам, то есть при определенных условиях, робот может захватывать, переносить объект, поднимать и опускать его, то есть выполнять работу человека.
Роботы-тележки способны перемещать паллеты по территории склада. Некоторые из них способны автоматически снимать нужные товары с полки и помещают на паллету. Некоторые изделия требуют для использования подготовки склада – разметки на полу или установки специальных меток на стенах и полках.
Роботы-палетайзеры – это промышленный манипулято, предназначенный для автоматического захвата и укладки продукции на паллеты.
Роботы-сортировщики должны уметь справляться с задачей разбора предметов с их точным распознаванием. Это можно делать, если есть цифровая база трехмерных изображений всех предметов, которыми манипулирует робот.
Плюсы использования роботов-сортировщиков для складских работ:
1. Большие возможности улучшения производства;
2. Отсутствие человеческого фактора в производственном процессе;
3. Высокая производительность автоматических устройств;
4. Использование в опасных и вредных для человека условиях.
5. Рациональность использования производственных помещений.
6. Быстрая окупаемость.
Минусы использования роботов-сортировщиков для складских работ:
1. Сокращение рабочих мест;
2. Высокие затраты на внедрение таких роботов;
3.Необходимо содержать дорогостоящего специалиста для текущего обслуживания и ремонта сложной техники;
4. Использование только на крупных производствах;
5. Вероятность сбоев.
Описание сборки робота-сортировщика.
Ниже приведена смета на комплектующие, необходимые для изготовления робота:
|
НАЗВАНИЕ |
КОЛ-ВО |
СТОИМОСТЬ |
|
Плата Arduino |
2 шт. |
400 руб. |
|
Моторы |
3 шт. |
300 руб. |
|
Серво-привод |
2 шт. |
400 руб. |
|
Колёса |
2 шт. |
100 руб. |
|
Опорное колесо |
1 шт. |
50 руб. |
|
Ультразвуковой датчик |
2 шт. |
150 руб. |
|
Датчик линии |
3 шт. |
100 руб. |
|
Манипулятор |
1 шт. |
200 руб. |
|
Аккумулятор |
3 шт. |
600 руб. |
|
Батарейный блок |
1 шт. |
100 руб. |
|
Драйвер мотора |
1 шт. |
150 руб. |
Всего: 2550 руб.
Перед сборкой была продумана электрическая часть робота. В качестве управляющей платы решено было использовать аналог платы Arduino от производителя Robot Dyn. По характеристикам данная плата практически не отличается от оригинала, но гораздо дешевле. Плата выполняет роль «мозга робота», управляя его действиями с помощью написанной заранее программы.

Также для сборки робота использовались имеющиеся детали:
– Платформа из оргстекла 2 шт., макетная плата, кнопка включения,
– крепёжные детали и провода.
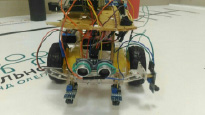
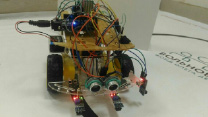
Робот после сборки выглядит так:


Для сборки робота мы использовали две пластины из оргстекла, соединили их между собой крепёжными деталями (стойки, винты и гайки с резьбой М3), закрепили на них все детали (плату, драйвер, датчики и т.д).
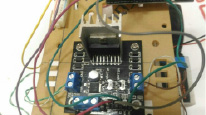
Для движения робот оснащён двумя моторами постоянного тока, которые управляются специальной платой – драйвером. Эта плата принимает аналоговые и цифровые сигналы от платы Arduino и подаёт питание на моторы. При этом аналоговые контакты (пины E1 и E2) используются для управления скоростью моторов, а цифровые контакты (пины IN1 и IN3) используются для управления направлением вращения моторов.
Для того чтобы ориентироваться в пространстве робот оснащается электронными органами чувств – датчиками. На нашем роботе установлено 2 датчика линии, с помощью которых робот может двигаться по заранее проложенной траектории (чёрная линия), например при движении со склада на пункт выдачи готовой продукции.
Кроме этого у робота есть ультразвуковой датчик препятствия, который помогает роботу избегать столкновений с препятствиями и другими складскими роботами. Несколько роботов могут двигаться по одной и той же траектории, не мешая друг другу.
Для автономной работы роботу необходимо питание. Решено было использовать раздельное питание: 3 батарейки 18650 с напряжением 3.7V (для питания моторов) и батарейка типа «Крона» с напряжением 9V (для питания платы и датчиков).

Для обнаружения объектов используется ещё один датчик линии.

В дальнейшем планируется доработать конструкцию робота: присоединить манипулятор, который позволит захватывать объекты после их обнаружения.

Конструирование
Оборудование для сборки, программирования и испытания робота: ноутбук, USB провод. Ноутбук – для написания программы и для дистанционного управления через USB провод, детали Ардуино.
Программирование
Программа представляет собой последовательность команд. Каждая команда имеет свои параметры. Они заданы в меню настроек. Команды записаны последовательно. Для основных этапов движения я выполнил краткое описание, что бы можно было наглядно продемонстрировать программу на занятиях.
Робот имеет сложную программу, которая написана на языке Ардуино. Ниже представлен код программы, с помощью которой робот двигается по линии и может захватывать и перевозить грузы.
int in1 = 5;
int in3 = 6;
int e1 = 9;
int e2 = 10;
int pins [4] = {5, 6, 9, 10};
int k = 30;
int baza = 17;
void setup()
{
for (int i = 0; i <= 3; i++)
{
pinMode(pins[i], OUTPUT);
}
for (int i = 7; i <= 12; i++) {
pinMode(i, OUTPUT);
}
setFrequency(2);
Serial.begin(9600);
}
void loop() {
int sensorLeft = analogRead(A0);
int sensorRight = analogRead(A5);
int sensorCargo = analogRead(A3);
int delta = sensorLeft – sensorRight;
int popravka = delta / k;
int m1 = baza – popravka;
int m2 = baza + popravka;
if (sensorCargo<300)
motor(0, 0);
else
motor(m1, m2);
}
void motor(int v1, int v2)
{
v1 = constrain(v1, -100, 100);
v2 = constrain(v2, -100, 100);
v1 = map (v1, -100, 100, -255, 255);
v2 = map (v2, -100, 100, -255, 255);
digitalWrite(in1, v1 < 0);
digitalWrite(in3, v2 < 0);
analogWrite(e1, abs(v1));
analogWrite(e2, abs(v2));
}
Результаты
Робот также двигается по заданной траектории.
Робот двигается прямолинейно согласно заложенной программе.
Робот передвигается по плоскости, поднимает, опускает груз и переносит.
Датчики могут работать согласованно и одновременно, если соблюдать определенные технические условия. Для данной модели робота-сортировщика написана программа работы сервоприводов.
Основные выводы
В дальнейшем можно оснастить моего робота-сортировщика сенсорными системами и системами технического зрения. Cистемы технического зрения позволяют производить сортировку продукции по форме, цвету и другим характеристикам. Для выяснения характеристик и параметров продукта можно использовать различные датчики и сканеры.
Он должен уметь различать признаки объектов и находить объекты по этим признакам. Это может быть штрих-код, QR код. Это происходит благодаря тому, что робот имеет в памяти образы нужных объектов и сравнивает с ними те, что попадают в поле его зрения. Сравнивает каждый предмет с образцом, который хранится в его памяти, по нескольким признакам, выделяет контуры, текстуру, цвет и другие признаки. В результате всего этого происходит «узнавание» объекта.
Заключение
Доказано, что разработка и создание робота-сортировщика для складских работ – актуальная проблема в настоящее время.
Перевод складов на роботизированные системы обслуживания – это уже давно общемировая тенденция, а в России такой процесс только начинается. Для обслуживания складских помещений ежедневно задействованы большое количество рабочих. Они маркируют, сортируют товар, перемещают и т.д. Замена работников складов на роботов сэкономит и деньги, и место для нового товара. Кроме того, роботизированные складские системы сокращают расходы примерно на 20 % и экономят до 50 % места на складе. Робот может управляться оператором или работать по заранее составленной программе. Использование роботов-сортировщиков позволяет облегчить или вовсе заменить человеческий труд на производстве.
Библиографическая ссылка
Мухаметов И.И., Артемова Д.Т., Альмеев Р.И. РАЗРАБОТКА КОНСТРУКЦИИ МОБИЛЬНОГО РОБОТА ДЛЯ СКЛАДСКИХ РАБОТ // Международный школьный научный вестник. 2019. № 3-2. ;URL: https://school-herald.ru/ru/article/view?id=1065 (дата обращения: 14.07.2026).