
В наши дни в стране большое значение уделяется сельскому хозяйству, наш район не исключение. Так как меня интересует роботизированная техника, я решил узнать о сельскохозяйственных роботах или агроботах – это роботы, используемые в сельскохозяйственных работах. Цель проста, заменить человеческий труд, повысить эффективность и урожайность.
В нашей стране после распада Советского Союза многие колхозы потерпели крах и прекратили свою деятельность и много полей пришли в запустение. Я думаю, что помочь возродить сельское хозяйство смогут новые технологии.
Ведущие сельскохозяйственные предприятия района применяют новые технологии в растениеводстве и животноводстве. В работе механизаторов и трактористов используются автоматизированные системы управления транспортом.
Мне кажется, для облегчения работы людей и экономии средств надо создавать и применять больше роботов.
Поэтому я представляю проект по робототехнике – «Робот-комбайн для прореживания свеклы». Это шаг вперёд для всего сельского хозяйства. Он позволит облегчить работу на полях.
Цель проекта – создать робототехническое устройство, как модель сельскохозяйственного робота, способную выполнять действия – прореживание свеклы.
Задачи проекта:
– изучить научно-популярную литературу, интернет – источники по роботизации сельского хозяйства;
– разработать компоновку робота;
– разработать основные принципы работы робота;
– разработать системы управления и безопасности;
– протестировать робототехническое устройство, исследовать работу датчиков.
Предмет исследования: устройство, выполненное из конструктора LEGO MINDSTORMS Education EV3.
Методы исследования:
– изучение информации в сети Интернет;
– анализ технических инструкций подобных роботов;
– эксперимент с роботом;
– анализ полученных результатов исследования.
Теоретическая часть
Роботы, используемые в сельском хозяйстве
Индустрия сельского хозяйства активно использует автоматизированные системы, но в использовании роботов несколько отстаёт, что вполне объяснимо сложностью и многовариативностью одних и тех же работ в этой сфере.
Важным аспектом разработки агророботов является энергоэффективность. Наиболее продвинутые разработки опираются на энергию солнца.
Ladybird – робот для выращивания овощей. Робот для контроля за ростом овощей, уничтожения вредителей, удаления сорняков. Ladybird – божья коровка, сходство с которой дают солнечные батареи, чем-то напоминающим крылья божьей коровки.
Rosphere – робот для мониторинга сельхозпосадок. Робот представляет собой небольшую шарообразную конструкцию, которая может беспрепятственно перемещаться по территории, независимо от рельефа. Rosphere оснащен встроенной системой спутниковой навигации, инновационным механизмам передвижения, который позволяет Rosphere передвигаться в нескольких плоскостях одновременно. Робот управляем удалённо, так и может работать самостоятельно, поскольку программируются алгоритмы поведения и выполнения задач. Помимо визульного наблюдения, робот обеспечивает сбор ряда параметров: состояние земли и посевов, степень зрелости плодов, наличие/отсутствие вредителей и т.д..
RowBot – робот для удобрений. Маленький, манёвренный, специализирован под одну задачу: распылять удобрения. Деликатен с растениями и при этом способен двигаться меж рядами посадок. Дозированное распыление, позволяет экономить на удобрениях и не нарушать экологический баланс.
BoniRob. Задача – изучение состояния урожая на полях. Однако платформа признана весьма удачной и ведутся разработки по расширению функционала этого робота.
Spirit. Трактор беспилотник, управляемый оператором удалённо, так и работающий по заданным алгоритмам автономно. Система навигации помимо использования спутника включает в себя решения с маяками, которые размещаются по углам поля (очерчивается рабочая зона за которую трактор не выходит).
В Японии разработан робот RiceBot – для посева риса. В работе использует GPS и набора гироскопы.
Agria – умеет пахать, культивировать почву, сеять, бороться с вредителями. Этот робот может взаимодействовать с себе подобными роботами создавая роботизированные системы.
Agribot – многофункциональный аграрный робот. Будущая замена тракторов: автономная машина, которая снабжается широким спектром навесного оборудования, в том числе и роботизированного. На машине может быть размещено сразу несколько наборов оборудования, тем самым, за один проход Agribot способен выполнить несколько операция: например скосить траву и осуществить опрыскивание.
Робот с высокой точностью убирает сорняки: альтернатива опрыскиваниям, способ получить экологически чистые продукты.
Технические характеристики проекта и принцип работы модели
Роботизированные системы разделяют на автоматизированные системы и, собственно роботов. Автоматизированные системы работают автономно, но требуют оператора на борту или удаленно. Роботы – не требуют вмешательства или контроля человека.
Роботов для использования в сельском хозяйстве относят к категории сервисных роботов. В свою очередь можно выделить такие подкатегории, как беспилотники, роботы для использования в точном земледелии, например агроботы, роботы для использования в животноводстве, пример: доильные роботы и т.д.
Зачем нужны роботы в сельском хозяйстве, спросите вы меня?
Так как передовые станы работают над переходом к безлюдному автоматизированному сельскому хозяйству на основе широкого применения мобильных и стационарных роботов. Как ожидается, это позволит добиться роста производительности на фоне повышения рентабельности, что обеспечивает снижение себестоимости продукции. Роботы способны выполнять различные операции – обработку почвы, ее удобрение, посев, посадка, доение скота, кормление и т.д.
Использование программно-аппратных комплексов беспилотного управления для замены водителей сельскохозяйственных транспортных средств позволяет сократить перерасход материалов, а также увеличивает урожайность за счет более точной обработки земли.
Преимущества робота перед сельхозтехникой:
Автономность
Робот может работать на поле полностью автономно, с помощью программы, при этом оператор контролирует процесс работы робота удаленно. На сложных участках или при аварийных или экстренных ситуациях оператор может вручную управлять роботом через пульт управления, камеры и специальные датчики.
Экологичность
Робот оснащен электрическим двигателем и поэтому не загрязняет окружающий мир. Перезарядка аккумуляторов происходит через солнечные батареи. В ненастную погоду робот может работать, используя двигатель внутреннего сгорания, работающего на метане. С развитием новых технологий в будущем планируется установка водородного двигателя.
Проходимость
Он может проходить в трудно проходимых местах, так как оснащен большими колесами.
Бесшумность
По сравнению с обычными комбайнами мой робот практически бесшумный за счёт того, что у него нет дизельного двигателя. Безопасность робота для людей и животных обеспечивается подачей специальных звуковых сигналов предупреждении об опасности.
Экономичность работы
Он может работать очень долго благодаря тому, что работает на солнечной энергии. Для работы в плохую погоду возможна работа на дополнительном двигателе на природном газе или водородном двигателе.
Недостатки
Для того чтобы реализовать проект «Комбайн для прореживания свеклы» нужно затратить много средств и ресурсов.
Появляется необходимость в кадрах – операторы роботами, нужны специально обученные люди с хорошим образованием. Для этого надо открывать новые кафедры в специальных ВУЗах, чтобы могли управлять роботом.
Экономическая целесообразность
Робот имеет высокий ресурс и мало ломается, так как робот работает на солнечной энергии – экономия на ГСМ.
Имея высокую первоначальную стоимость, робот окупится через 3 – 4 года использования.
Техническое обслуживание робота 1 раз в год.
Практическая часть
Демонстрация робота-комбайна
Проект собран из набора для робототехники LEGO MINDSTORMS Education EV3 . Программа для управления роботом написана на языке программирования NXT-G. Управление роботом в дистанционном режиме происходит по каналу Bluetooth через приложение для системы Android и IOS.
Компоновка робота
Робот состоит из нескольких составляющих: системный блок, 2 больших мотора, средний мотор, вращающие элементы, опорные колеса, ножи, держатель равновесия (приложение 1, приложение 2).
Процесс работы
Оператор робота будет следить за передвижение робота с помощью специальных камер, которые будут установлены на роботе и системы Глонас. На комбайне будут установлены ультразвуковой датчик и динамик, чтобы отпугивать животных и предупреждать людей. Эти системы необходимы для того, чтобы не позволить роботу задавить кого-нибудь или нанести вред другой технике и постройкам.
Робот едет прямо на указанную ему длину поля, захватывая сразу 2 рядка, так как свекла посажена густо ее нужно проредить, на определенном расстоянии. Он проезжает и прореживает именно на то расстояние, которое необходимо для того, чтобы свекла выросла нужного размера.
Механизм вращается, радиус между ножами соответствуют расстоянию между свеклой. Ножи движутся вдоль рядка, заглубляются в почву на 1-2 см и срезают все растения, находящиеся в зоне действия ножей.
Нож вырезает сорняки и лишние растения. Действия выполняются по циклу, закончив обработку данного участка, машина разворачивается и переходит на новый участок. Действия продолжаются, пока не закончится поле (количество действий указанные в программе). (Приложение 3)
Заключение
При работе над проектом были использованы разнообразные методы и приемы: изучение технической и научно – популярной литературы, конструирование, программирование, испытание, корректировка технических ошибок, анализ и систематизация материала.
Робот может управляться оператором, либо работать по заранее составленной программе. Использование роботов позволяет облегчить или вовсе заменить человеческий труд в сельском хозяйстве, на производстве, в строительстве, при рутинной работе, при работе с тяжёлыми грузами, вредными материалами, а также в других тяжёлых или небезопасных для человека условиях.
Теоретическая значимость работы – в ходе проектирования, конструирования, программирования моделей, я пополнил свои знания в области физики, математики, технологии.
Практическая значимость работы – в ходе выполнения исследовательской работы, была разработана модель робота, управление которой осуществляется с помощью программы EV3.
«Робот-комбайн для прореживания свеклы» является передовой и перспективной сельскохозяйственной техникой будущего. Он дорог, но затраты компенсируются высокой производительностью, экологичностью и безопасностью.
С помощью такого робота наш район сможет покрыть свои потребности в технике, рабочей силе.
Приложение 1
Этапы сборки






Приложение 2
Внешний вид робота

Вид сверху
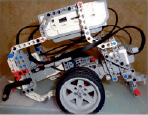
Вид справа (сбоку)
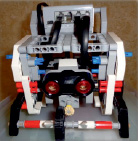
Главный вид (спереди)

Вид сзади
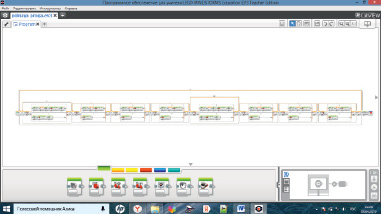
Приложение 3
Элемент программы для отпугивания животных и предупреждать людей об опасности
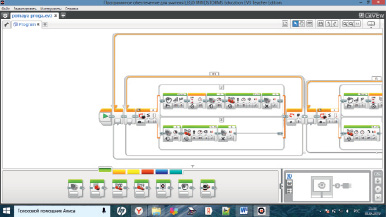
Программа движения робота
Библиографическая ссылка
Дегтярев А.Н. РОБОТ-КОМБАЙН ДЛЯ ПРОРЕЖИВАНИЯ СВЕКЛЫ // Международный школьный научный вестник. 2019. № 5-3. ;URL: https://school-herald.ru/ru/article/view?id=1228 (дата обращения: 14.06.2026).