
Введение
Современное общество, не смотря на современные технологии, все еще использует ручной тяжелый, а иногда и опасный труд для транспортировки, различных предметов, материалов, веществ. Для того чтобы сберечь здоровье человека и заменить труд его, необходимо использовать автоматизированные машины, такие как роботы. Использование роботов позволяет облегчить или вовсе заменить человеческий труд на производстве, в строительстве, при рутинной работе, при работе с тяжёлыми грузами, вредными материалами, а также в других тяжёлых или небезопасных для человека условиях. Робот может управляться оператором, либо работать по заранее составленной программе.
Актуальность
Роботы-помощники прочно вошли в нашу повседневность. Эта тема привлекла наше внимание, ведь я давно увлекаюсь робототехникой. Возник вполне закономерный вопрос: какие типы роботов существуют и возможно ли их создание с использованием конструктора LEGO Mindstorms EV3? Наблюдая за работой тяжелой техники на стройке, в частности за бульдозером, который демонстрировал безупречное выравнивание грунта, у меня появилась идея о создании робота-бульдозера. Робот-бульдозер, который способный снизить или даже полностью исключить необходимость в человеческом труде на производствах, в строительстве и в других сложных и потенциально опасных условиях.
Актуальность проблемы исследования обусловили выбор темы проекта: «Создание робота-бульдозера на основе конструктора LEGO mindstorms EV3».
Объектом исследования является конструктор лего mindstorms EV3.
Предметом исследования является принцип строения и работы робота-бульдозера на основе конструктора лего mindstorms EV3.
Цель проекта: Собрать движущегося робота-бульдозера на основе конструктора Lego mindstorms EV3.
Задачи проекта:
1) Изучить историю появление бульдозера;
2) Изучить виды роботов;
3) Изучить какие виды бульдозеров существуют;
4) Собрать движущегося робота-бульдозера на основе конструктора лего mindstorms EV3;
5) Установить на робота-бульдозера 2 датчика и 3 сервомотора;
6) Создать программу для работы робота-бульдозера;
7) Проверить работу робота-бульдозера;
8) Сделать вывод.
Для реализации поставленных задач нами использовался конструктор Lego Mindstorms EV3.
Гипотеза исследования. Можно ли сконструировать своими руками робота-бульдозера с помощью конструктор Lego Mindstorms EV3?
Методы исследования: анализ научной литературы по проблеме исследования, анализ результатов исследования обобщение опыта моделирования и конструирования.
Тип проекта: проектно – исследовательский.
План проекта: Составить последовательную работу над проектно – исследовательской деятельностью робота-бульдозера (таблица 1).
Таблица 1.
План проектно – исследовательской деятельности
|
№ |
Этапы проектирования |
Сроки выполнения |
|
I |
Организационно-подготовительный |
2 часа |
|
II |
Исследовательский |
3 часа |
|
III |
Конструкторский |
6 часа |
|
IV |
Программистский |
2 часа |
|
V |
Заключительный |
2 часа |
Истоки бульдозеров восходят к ранним орудиям обработки земли — рамам с металлическими лезвиями, которые передвигали животные, такие как мулы или лошади. На рубеже XVIII века английский инженер Ричард Эджуорт запатентовал собственную систему гусеничного хода. В 1879 году российский изобретатель-самоучка Фёдор Блинов предложил концепцию транспорта с бесконечными рельсовыми опорами, предназначенного для перемещения грузов по различным типам дорог. Первая зафиксированная версия бульдозера была создана американскими фермерами Джеймсом Каммингсом и Эрлом Маклеодом. Они сконструировали навесной отвал для колесного трактора Fordson и зарегистрировали патент в 1925 году под названием «навесное устройство для тракторов». Во времена Второй мировой войны эти машины находили широкое применение при возведении аэродромов, фортификационных сооружений и автодорог. Они помогали убирать завалы после авиационных ударов и готовить участки для высадки десантов [1].
Анализ истории развития бульдозера позволил глубже понять их роль и эволюцию как технических решений.
Бульдозер — это мобильная землеройная машина, предназначенная для срезания рельефа и перемещения грунтов и других материалов на расстояние до 150 метров. Его конструкция состоит из базового трактора или тягача, на передней части которого горизонтально установлен рабочий орган — отвал. Это машина циклического типа: рабочий цикл включает этап разработки и перемещения материала (например, удаление кустарников, засыпка траншей), затем возврат в начальное положение — холостой ход, после чего процесс повторяется. Существует два основных типа бульдозеров по ходовой части: гусеничные и колесные. Гусеничные модели чаще всего используются в сложных грунтовых условиях благодаря своей проходимости [2].
Колесные — подходят для мягких поверхностей и удобны при частой смене площадок работ. Отвал может быть неповоротным — закреплённым под прямым углом к продольной оси машины, с минимальным поворотом в поперечной плоскости. Поворотный отвал позволяет изменять направление движения материала, поворачиваясь в обе стороны относительно центрального положения. Универсальные бульдозеры оснащаются шарнирно-сочленённым отвалом из двух равных секций, которые могут располагаться перпендикулярно оси, под углом в одну сторону или в разные стороны — это увеличивает универсальность при работе в труднодоступных местах. Бульдозеры-погрузчики отличаются наличием подъёмной стрелы, на которой шарнирно крепится отвал. При необходимости его можно заменить на грузоподъёмный ковш или другое сменное оборудование, что делает технику многозадачной. Наиболее распространены бульдозеры с неповоротным отвалом, с поворотным отвалом, бульдозеры-рыхлители, а также бульдозеры-погрузчики [5].
Изучив информацию о видах и строении бульдозера, мы узнали, много нового о конструкции и механизмах его, что это нам поможет в будущем при создании нашего робота-бульдозера.
Роботы классифицируются по функциональному назначению на несколько основных типов: бытовые, сервисные, медицинские, военные, промышленные и развлекательные. Бытовые роботы созданы для содействия человеку в ежедневных делах — от уборки до контроля за состоянием дома. Сервисные модели включают устройства для сбора информации, демонстрации новинок техники, а также автоматизированные решения в сферах обслуживания — например, информационные агенты, администраторы, промо-агенты, экскурсоводы. Медицинские роботы выполняют диагностику и лечение, обеспечивая точность и снижение рисков для пациентов. Военная робототехника представляет собой комплексные системы с искусственным интеллектом, способные выполнять задачи, опасные или невозможные для людей, в том числе разминирование, разведку и управление боевыми действиями. Промышленные роботы служат для автоматизации производственных циклов; среди них особую значимость имеют литейные установки, работающие при экстремальных температурах, а также 3D-принтеры — один из ключевых успехов современной технологии. Создание таких машин связано с необходимостью обеспечить стойкость к высоким нагрузкам и условиям эксплуатации. Развлекательные роботы рассчитаны на самостоятельную работу в общественных местах или жилых пространствах, способны общаться, играть, обучать. Исследовательские роботы предназначены для работы в средах, недоступных для человека: в открытых космосах, подводных глубинах, в условиях сильной радиации или чрезвычайно низких/высоких температур. Подводные аппараты могут достигать десятков километров глубины, преодолевая огромное давление, проводят изучение дна океанов, берут пробы пород и воды, ведут наблюдения за фауной, открывая новые формы существования. Марсоходы способны перемещаться по марсианской поверхности, проводить исследования геологии и климата планеты, искать следы жидкой воды и органических соединений, которые могут указывать на наличие жизни в её далёком прошлом [6].
Проанализировав различные категории роботов, мы расширили своё представление о современных технических решениях, что будет полезно при проектировании собственного робота-бульдозера.
Собирать конструкторы ЛЕГО начал с 1 класса, когда записался на робототехнику. Мне очень нравится собирать движущиеся лего машины, механизмы, роботов. С каждым годом на занятиях собирал более сложные проекты движущихся роботов, который один из них вам представляю, конструирование робота-бульдозера. Прежде чем, приступить к сборке робота-бульдозера, нужно выполнить эскиз будущего робота-бульдозера (Рисунок 1).
Рисунок 1. Эскиз будущего робота-бульдозера.
Для конструирования робота-бульдозера нам понадобится конструктор Lego Mindstorms EV3 базовый и ресурсный наборы (Рисунок 2). Собирать начнем гусеничную платформу, на которую установим сервомоторы, контроллер, датчики, при которых будет перемещаться наша платформа. На первом этапе сложностей конструирования робота-бульдозера не возникло. Однако при дальнейшей работе с роботом бульдозером, конструкцию пришлось существенно доработать, а именно установить гладкие детали для дизайна и красоты нашего робота.

Рисунок 2. Конструирование робота-бульдозера.
Использование сервомотора для движения робота бульдозера.
Мы установили два больших сервомотора справа и слева для движения ведущих гусениц бульдозера, а в центре еще один малый сервомотор для подъема и опускания отвала (Рисунок 3).

Рисунок 3. Три сервомотора.
Контроллер EV3 принимает и обрабатывает информацию, поступающую из загруженной программы (Рисунок 4). К контроллеру через семиканальный провод подключаются остальные составляющие робота три интерактивных сервомотора, два из которых служит для передачи движения гусениц, а один для передачи движения отвала робота.
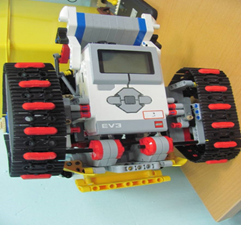
Рисунок 4. Контроллер EV3 на гусеничной платформе.
Установим спереди один датчик расстояния для робота-бульдозера (Рисунок 5). Ультразвуковой датчик расстояния — это датчик, делающий робота бульдозера зрячим. Он позволяет ему видеть и различать объекты.

Рисунок 5. Датчик расстояния.
Также установим на робота-бульдозера один датчик касания на задней части робота для запуска программы (Рисунок 6).

Рисунок 6. Датчик касания.
Чтобы робот-бульдозер полноценно двигался вперед, назад, подымал и опускал отвал надо прописать программу на языке программирования EV3 всю цепочку действий на компьютере (Рисунок 7).

Рисунок 7. Контроллер EV3.
Прописав программу, мы подключаемся к персональному компьютеру через порт USB проводом к порту и загружаем программу в контроллер EV3 (Рисунок 8).

Рисунок 8. Программа робота-бульдозера.
Собранный нами робот-бульдозер выполняет все заложенные в программу действия. Робот передвигается по плоскости в перед и назад, подымает и опускает отвал.
Вывод: Собранный нами движущейся робот-бульдозер выполняет все заложенные в программу действия (Рисунок 9). Исходя из полученных результатов, можно утверждать: выдвинутая нами гипотеза оказалась верной – с использованием конструктора LEGO Mindstorms EV3 вполне реально собрать функционирующего робота-бульдозера. Цель проекта достигнута, задачи успешно выполнены, а сам процесс оказался весьма познавательным и захватывающим.

Рисунок 9. Робот-бульдозер.
Заключение: В процессе работы мы освоили сборку робота-бульдозера с использованием конструктора LEGO Mindstorms EV3. Упорство и желание позволяют воплотить в реальность даже достаточно сложные проекты, независимо от возраста. Занятия робототехникой способствуют развитию логического мышления и мелкой моторики, а также дают представление об основных принципах программирования и конструирования роботов.
В будущем мы сможем создать еще более сложного и современного робота, который будет отличаться своей многофункциональностью и многозадачностью.
Библиографическая ссылка
Матвиенко М.В. СОЗДАНИЕ РОБОТА-БУЛЬДОЗЕРА НА ОСНОВЕ КОНСТРУКТОРА LEGO MINDSTORMS EV3 // Международный школьный научный вестник. 2026. № 1. ;URL: https://school-herald.ru/ru/article/view?id=1677 (дата обращения: 30.07.2026).