
Данная статья является реферативным изложением основной работы. Полный текст научной работы, приложения, иллюстрации и иные дополнительные материалы доступны на сайте III Международного конкурса научно-исследовательских и творческих работ учащихся «Старт в науке» по ссылке: https://www.school-science.ru/0317/7/27908.
Актуальность темы. Раздел физики, посвященный колебаниям и колебательным явлениям, на данный момент является развитым научным направлением. Колебательные явления сильно распространены в природе и являются неотъемлемой ее частью. В связи с этим возникает предположение о том, что многие явления как в природе, так и обществе могут быть описаны с помощью схожих математических моделей. В качестве иллюстрации этого утверждения может быть представлена данная работа. Изучение процессов на стыке двух каких-либо наук, позволит найти решения многих вопросов, стоящих перед нами.
Цели и задачи исследования. Цель моего исследования – изучить возможность описания заимосвязь между физикой и экономикой.
Для достижения этой цели мне необходимо было решить следующие задачи:
1. Изучить физику колебаний на примере механических моделей.
2. Проанализировать модель малого предприятия.
3. Внести изменения в систему предприятия.
4. Сделать выводы.
Физика колебаний
Дифференциальное уравнение гармонического осциллятора
В качестве модели гармонического осциллятора возьмём груз массы m, закреплённый на пружине жёсткостью k. Согласно закону Гука:  , а также второму закону Ньютона:
, а также второму закону Ньютона:  . Из второго закона Ньютона и закона Гука получим:
. Из второго закона Ньютона и закона Гука получим:  . Так как:
. Так как:
 , a
, a  ,
,
то получим
 ,
,
следовательно:
 ,
,
значит

или
 .
.
Отсюда также:

собственная частота колебаний гармонического осциллятора. Дифференциальное уравнение гармонического осциллятора имеет вид:
 .
.
Решением данного уравнения является выражение
 .
.
Здесь  – это циклическая частота осциллятора, а
– это циклическая частота осциллятора, а  – начальная фаза колебаний. Полной фазой колебаний осциллятора является выражение
– начальная фаза колебаний. Полной фазой колебаний осциллятора является выражение  , указывающее состояние тела в данный момент времени.
, указывающее состояние тела в данный момент времени.
Тогда:

или
 .
.
В момент t = 0:
Домножим обе части на dx, а затем возьмем неопределенный интеграл от обеих частей:

 =
=  .
.
Получим:
 ,
,
что, по сути, является формулой для закона сохранения энергии, с – полная механическая энергия системы.
В общем виде уравнение движения является дифференциальным уравнением типа:
 ,
,
что означает, то, что воздействие на систему зависит от трех параметров  , определяющих ее поведение.
, определяющих ее поведение.
Понятие о фазовой плоскости.
Запишем закон сохранения механической энергии

и сделаем некоторые преобразования:
 ,
,
затем получим:
 .
.
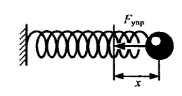
Рис. 1
Заметим, что формула:

является уравнением эллипса в декартовых координатах, где мы по оси х отложим x, а по оси y отложим V. Тогда соответственно максимальные значения
 ,
,
a  .
.
При изменении энергии осциллятора Е, размеры эллипса также меняются, значит вся совокупность траекторий представляет собой систему вложенных друг в друга эллипсов. Наличие замкнутых траекторий говорит о том, что движение является периодическим. Картина фазовых траекторий вблизи центра (положения равновесия) гармонического осциллятора называется особой точкой типа центр. Геометрическое место изображающих точек для данного движения называется фазовой траекторией.
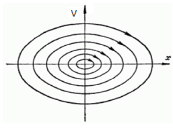
Рис. 2
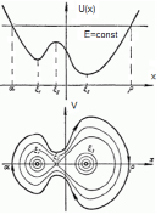
Рис. 3
Теперь рассмотрим некоторую динамическую систему, потенциальная энергия U которой следующим образом зависит от координаты, как показано на рисунке. Тогда если мы возьмем значение потенциальной энергии на уровне U=E, то на фазовой плоскости координата х будет ограничена соответственными значениями  и
и  . Здесь точки
. Здесь точки  и
и  соответствуют положению устойчивого равновесия, а точка
соответствуют положению устойчивого равновесия, а точка  соответствует Седловой точке фазовой плоскости. Портрет фазовой плоскости также будет изменятся с выбором уровня потенциальной энергии.
соответствует Седловой точке фазовой плоскости. Портрет фазовой плоскости также будет изменятся с выбором уровня потенциальной энергии.
Таким образом, с помощью фазовой плоскости можно описать любые поведения динамической системы и она становится особо полезной при описании нелинейных динамических систем.
Добротность системы и логарифмический декремент
До этого момента мы рассматривали простейшие системы без наличия трения, однако на практике такое встречается редко. Поэтому теперь рассмотрим систему шарика на пружинке, но находящегося в жидкости. Теперь кроме закона Гука поведение системы будет также определять сила вязкого трения, возникающая при движении шарика. Она будет пропорциональна скорости движения тела при малых скоростях и квадрату скорости при больших скоростях. Мы рассмотрим первый случай. Тогда, например, поведение системы будет описано следующим дифференциальным уравнением второго порядка:
 .
.
Будем искать решение данного уравнения в виде:  . Тогда, следовательно:
. Тогда, следовательно:
 ,
,
 .
.
Тогда решением данного дифференциального уравнения является выражение:
 .
.
Данное движение представляет собой затухающие колебания с постоянной частотой. Изменение амплитуды процесса описывается функцией:  , тогда через промежуток времени T, равный периоду колебаний будет:
, тогда через промежуток времени T, равный периоду колебаний будет:
 ,
,
тогда
 .
.
Величина  называется логарифмическим декрементом затухания осциллятора. За период Т амплитуда уменьшается в exp(-d) раз.
называется логарифмическим декрементом затухания осциллятора. За период Т амплитуда уменьшается в exp(-d) раз.
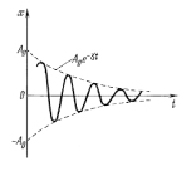
Рис. 4.
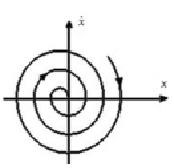
Рис. 5
Существует также еще один параметр, характеризующий затухание в системе. Он называется добротностью и определяется как:

или же
 .
.
Данные величины безразмерны и характеризуют затухание более полно, нежели коэффициент затухания. На фазовой плоскости картина представляет собой логарифмические спирали, накручивающиеся на начало координат, которое соответствует всегда положению равновесия. Точка равновесия данной системы представляет собой устойчивый фокус.
Динамические системы могут быть не только с диссипативными силами трения. Рассмотрим теперь систему, где внешние силы наоборот способствуют раскачке колебаний. Иногда такие силы называют «отрицательным трением».
Дифференциальное уравнение, описывающее данный процесс имеет вид:  . Тогда решением данного уравнения является
. Тогда решением данного уравнения является  . Тогда величина
. Тогда величина  уже является инкрементом колебаний системы. За период Т амплитуда увеличивается в exp(d) раз. Понятно, что при сколь угодно малых начальных возмущениях
уже является инкрементом колебаний системы. За период Т амплитуда увеличивается в exp(d) раз. Понятно, что при сколь угодно малых начальных возмущениях  и
и  возникают колебания, амплитуды которых будут возрастать по показательному закону, т.е. состояние данной системы будет неустойчиво.
возникают колебания, амплитуды которых будут возрастать по показательному закону, т.е. состояние данной системы будет неустойчиво.
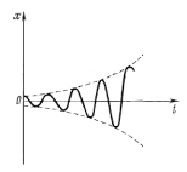
Рис. 6
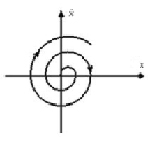
Рис. 7

Рис. 8
На фазовой плоскости в этом случае состоянию равновесия соответствует точка неустойчивый фокус (см., рис. 7).
Примером механической системы, соответствующей данной динамической системе является брусок, прикрепленный к пружине и лежащий на ленте транспортера, которая может двигаться с регулируемой скоростью V (см., рис. 8). Между бруском и лентой существует сила сухого трения. Уравнение колебаний такой системы соответственно имеет вид
 .
.
Предположим, что скорость бруска мала:  , тогда получим:
, тогда получим:
 .
.
Постоянное слагаемое правой части приводит только к смещению положения равновесия на величину  , поэтому для малых отклонений от данной точки
, поэтому для малых отклонений от данной точки  выполняется:
выполняется:
 ,
,
где  .
.
Модель деятельности малого предприятия
Динамическая модель
В данной главе мы рассмотрим деятельность небольшой компании. Основой метода анализа финансового состояния предприятия является динамическая система. Этот подход опирается на представления теории самоорганизации компании. Рассмотрим нелинейную модель Чернавского Д.С. (см., Д.С. Чернавский, Н.И. Старков, С.Ю. Малков, Ю.В. Косе, А.В. Щербаков Об эконофизике и ее месте в современной теоретической экономике // Успехи физических наук, 2011, т. 181, №7, с. 767–773).
Динамической переменной является объем денежных оборотных средств M. Уравнение баланса предприятия выглядит следующим образом:
 ,
,
W – выручка от реализации продукта. Член  отражает производственные издержки.
отражает производственные издержки.  – время оборота,
– время оборота,  – объем внешних заимствований. Соответственно, член
– объем внешних заимствований. Соответственно, член  отражает выплаты по кредиту. В уравнении выше рассмотрен случай бессрочного кредита, K – капитальные вложения собственных средств (затраты на расширение производства уже производимого продукта и разработку новых технологий, затраты на поддержание инфраструктуры предприятия).
отражает выплаты по кредиту. В уравнении выше рассмотрен случай бессрочного кредита, K – капитальные вложения собственных средств (затраты на расширение производства уже производимого продукта и разработку новых технологий, затраты на поддержание инфраструктуры предприятия).
Член  отражает затраты на хранение готового продукта на складе, P – количество участвующего в обороте готового товара на складе, выраженное в рыночных ценах,
отражает затраты на хранение готового продукта на складе, P – количество участвующего в обороте готового товара на складе, выраженное в рыночных ценах,  – доля оборотных средств, затрачиваемая на хранение единицы готовой продукции на складе в единицу времени. Как правило, эта доля невелика и τs>>τ1. Однако, при затоваривании склада эти издержки могут играть существенную роль.
– доля оборотных средств, затрачиваемая на хранение единицы готовой продукции на складе в единицу времени. Как правило, эта доля невелика и τs>>τ1. Однако, при затоваривании склада эти издержки могут играть существенную роль.
Выручка W равна количеству проданного товара Qr по рыночной цене p за единицу времени: W = Qrp. Количество проданного товара Qr зависит от количества товара на складе P, а также от спроса на данный продукт. В случае, когда предложение превышает спрос, рынок насыщается, и производитель не может продать количество товара, превышающее некоторое значение Qm. При этом будем считать, что при пустом складе ничего нельзя продать. Тогда зависимость Qr(P) можно записать в следующем виде:
 ,
,
при этом P0 – максимальное количество товара на складе.
Сумма всех затрат за время оборота равно количеству произведенного товара, выраженному во внутренних ценах pin. Величина Δp=p–pin является добавленной стоимостью. Мы будем использовать величину
 .
.
Уравнение баланса для склада тогда выглядит следующим образом:
 .
.
Здесь  – количество товара, поступающего на склад, выраженное в рыночных ценах, W – количество продаваемого товара.
– количество товара, поступающего на склад, выраженное в рыночных ценах, W – количество продаваемого товара.
Уравнения выше составляют модель для случая одного продукта. Учитывая
 ,
,
ее можно переписать следующим образом:
 ;
;
 .
.
Будем считать, что  , тогда из предыдущих условий получим:
, тогда из предыдущих условий получим:
 ;
;
 .
.
Запишем систему уравнений в безразмерном виде. Введем безразмерные переменные:
 ;
;
 ;
;  ;
;
 ;
;  ;
;  .
.
Таким образом, система примет вид:
 ;
;
 .
.
(Для удобства n мы в дальнейшем опустим.)
Также в нашем анализе данной системы мы не будем учитывать возможные кредитные займы и будем исходить из того, что предприятие начинает свою деятельность, исходя строго из личных средств, таким образом:
 ;
;
 .
.
Условие равновесия в такой системе Р=0 и М=0.
С экономической точки зрения, такое описание соответствует состоянию малого предприятия в том случае, когда оно только начинает свою деятельность, то есть при не слишком больших отклонениях от положения равновесия. (Иначе говоря, данное предприятие можно именовать, как Startup).
Приведем полученную систему двух линейных дифференциальных уравнений к одному дифференциальному уравнению 2 порядка:

 ;
;
 .
.
Найдем решение уравнения в форме 
 ;
;
 .
.
В итоге решение уравнения запишется в виде:
 .
.
Теперь рассмотрим подробнее данную модель:

Сравнивая с дифференциальным уравнением для колебаний механического осциллятора:
 ,
,
мы видим, что уравнение для модели предприятия имеет тот же вид, если иметь ввиду, что:
 .
.
Рассмотрим, 4 случая:
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  .
.
Библиографическая ссылка
Шишкин Ф.А. АНАЛИЗ ЛИНЕЙНОЙ КОЛЕБАТЕЛЬНОЙ МОДЕЛИ РАЗВИТИЯ МАЛОГО ПРЕДПРИЯТИЯ // Международный школьный научный вестник. 2017. № 3-2. ;URL: https://school-herald.ru/ru/article/view?id=286 (дата обращения: 23.07.2026).