
Создание принципиального нового движителя для специального транспорта следует из нерешенной технической проблемы. До сих пор люди не могут надежно и эффективно передвигаться по труднодоступным районам и малопроходимым местностям: мелководью, болотам, шуге, подводным ледникам, мелководному шельфу с многочисленными отмелями. Даже передвижение по мелководным рекам связано с большими опасностями для традиционных кораблей, с ограничениями сроков навигации, обследованием русел рек и расстановкой многочисленных навигационных знаков. После инвестиций труднодоступные районы становятся привлекательными для дальнейшего вложения средств и ускоренного социального и промышленного развития. При выборе нового специального вида транспорта сначала надо рассмотреть все возможные варианты передвижения, а потом оценивать, рассчитывать и уточнять экономические показатели. В этой работе изучается конкретный вопрос создания лодки-амфибии, способной преодолевать отмели. Такая лодка-амфибия может оказаться перспективным средством передвижения не только для Министерства чрезвычайных ситуаций (МЧС), но и для отдельных граждан. Первое слово в названии обозначает основную область передвижения транспортного средства – вода. Второе слово названия обозначает второстепенную область передвижения транспорта, которая внезапно может появиться на его пути. Лодка-амфибия предназначена для транспортировки людей и грузов по воде с возможностью иногда преодолевать отмели, но ни в коем случае не предназначена для движения по земле.
При работе над техническим предложением был проведен анализ литературы и найдены источники информации, в которых дальние аналоги предлагаемой лодки-амфибии уже встречались, были изготовлены и испытаны, но в которых не были увидены перспективы дальнейшего развития. Это связано с тем, что проблема промышленного освоения труднодоступных областей сравнительно новая, появилась 20-30 лет назад.
1. Анализ литературы
Известен шагающий механизм и шагающая машина П.Л. Чебышева, которые были показаны на Всемирной выставке в Париже в 1878 году [1, 2]. Этот механизм позволяет получить траекторию движения точки, очень похожую на траекторию движения стопы человека или копыта животного. Для предлагаемого технического решения и движителя лодки-амфибии у этих аналогов была заимствована траектория движения исполнительного механизма движителя – весла, совмещенного с опорой. У этих же аналогов был взят за основу лямбдаобразный механизм, который был применен по-новому, в перевернутом виде, с отказом от природной траектории шага.
Пафнутий Львович Чебышев предложил гребной механизм в качестве движителя для лодки [2,3]. Это устройство основано тоже на лямбдаобразных механизмах, но примененных в одной паре, с установкой на одном кривошипе. Однако гребной механизм П.Л. Чебышева представлял теоретическую ценность, но не практическую. Сохранилось две фотографии такой лодки, стоящей на отмели. Однако неизвестно, сама лодка зашла на мелководье рядом с берегом или ее туда затащили. Оказывается, гребной механизм П.Л. Чебышева можно упростить, доработать, изменить его положение относительно лодки и применить в качестве универсального движителя для гребли по воде и непродолжительного, кратковременного шагового движения по мелководью.
В работе [4] Скворцовой А.А. и Папиашвили Э.Д. предложена универсальная шагающая платформа для освоения тундры, Арктики и шельфовых областей, способная передвигаться по мелководью. В этой работе предлагается синхронизировать работу пары лямбдаобразных механизмов не только общим ведущим кривошипом, но и дополнительными устройствами, например, цепными передачами, как в системе газораспределительного механизма двигателя внутреннего сгорания.
После изучения аналогов сдвоенный лямбдаобразный механизм П.Л. Чебышева с общим ведущим кривошипом был выбран в качестве прототипа для последующего максимального упрощения конструкции.
2. Решаемая проблема и новая идея
Недостатком всех перечисленных устройств и машин является ограничение окружающей среды, в которой они могут передвигаться. Например, гребной механизм для лодки может работать только в воде, а шагающий механизм действует только на суше. Закономерен вопрос о создании единого, общего движителя для больших и малых глубин.
Решаемая проблема заключается в обеспечении передвижения транспорта по бездорожью: отмелям, в том числе обледенелостям, болотам, шуге, подводным мелководным песчаникам. Такие виды труднопроходимых поверхностей встречаются в северных районах, которые сейчас начинают все быстрее осваиваться. Обычные автомобили часто не в состоянии преодолеть затопленные места, а лодки не могут проплыть по малой глубине отмелей. Для преодоления таких препятствий применяют автомобили-амфибии или вездеходы-амфибии, созданные, как правило, на базе военной техники.

Рис. 1. Назначение, общая идея и физические принципы движения
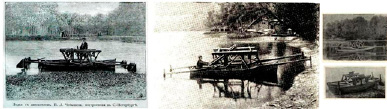
Рис. 2. Исторические аналоги и прототип
Новое техническое предложение направлено на создание лодки-амфибии, потому что основной средой передвижения является вода, а вспомогательной – отмели (рис. 1). Это ни в коем случае не автомобиль-амфибия, для которого, напротив, основная среда передвижения – суша, дополнительная – вода.
Новая идея появилась после изучения литературы о механизмах П.Л. Чебышева. В книге И.И. Артоболевского [2] есть не только схемы механизма, но и фотографии лодки с этим механизмом (рис. 2).
На первых старинных фотографиях даже при низком качестве изображений четко видно, что лодка П.Л. Чебышева без малейших затруднений причаливает к мелководью вплотную к берегу. Сейчас трудно сказать, обратил ли внимание на этот факт П.Л. Чебышев, но вполне настало время детально изучить новое свойство гребного механизма, возможно, усовершенствовать устройство, предложить в качестве движителя на специальный вид транспорта. Идея заключается в рассмотрении усовершенствованного гребного механизма не только для передвижения по воде, но и для перемещения по отмелям.
3. Общая характеристика работы
Цель работы: предложить движитель для лодки-амфибии, способной преодолевать отмели.
Новизна: новое применение известной пары лямбдаобразных механизмов П.Л. Чебышева, отказ от природной траектории шага щитков-весел при движении по воде.
Актуальность: освоение новых труднодоступных географических областей (шельфы, отмели, болота, шуга и т.д.).
Практическая значимость: создание движителя и специализированного транспортного средства для труднодоступных районов.
Объект исследования – лодка-амфибия как новый вид специального транспорта.
Предмет изучения – характеристики комплексного, совмещенного, единого, общего привода и движителя лодки-амфибии для перемещения как по основной водной среде, таки по дополнительным преградам в виде отмелей.
Метод решения задачи – натурное моделирование с теоретическими расчетами и проверкой совпадения полученных результатов.
Решаемые задачи:
1) теоретически изучить верхнюю часть траектории в виде дуги для точки шатуна в лямбдаобразном четырехзвенном механизме П.Л. Чебышева, которая в технической литературе по шагающим машинам осталась почти без внимания из-за своего вспомогательного характера;
2) изготовить действующий макет сдвоенной пары лямбдаобразных механизмов на общем шатуне, приспособленный для проведения дальнейшей опытно-конструкторской работы;
3) изучить и обосновать возможность переворота лямбдаобразного механизма для использования дуги в качестве рабочей части траектории привода щитка-весла для гребли на лодке и стопы-опоры для шага на отмели;
4) изучить движение щитка-весла в воде при различных углах атаки, близких к прямым углам;
5) изготовить действующий макет лодки амфибии и испытать его в реальных условиях заболоченных и песчаных отмелей пруда, а также на затопленных обледенелостях;
6) подготовить материалы к патентованию и защите интеллектуальной собственности.
Содержательная формулировка цели работы заключается в предложении общего для суши и для воды, движителя лодки-амфибии, основная среда для которой является водной, но возможно перемещение по отмелям, болотам и ледяной шуге как по вспомогательной среде.
4. Анализ гребного механизма П.Л. Чебышева
Для достижения поставленной цели работы было предложено рассмотреть возможность совмещения преимуществ шагающей машины П.Л. Чебышева [1] с гребным механизмом, предложенным этим же автором [3].
В гребном устройстве П.Л. Чебышева два лямбдаобразных механизма с общим ведущим кривошипом дополнены еще двумя другими механизмами для обеспечения прямолинейного участка движения механических весел, когда те поочередно погружаются в воду. Прямолинейное движение весел в воде не является очень жестким требованием, потому что движение верхней точки подвижного шатуна в четырехзвенном лямбдаобразном механизме П.Л. Чебышева даже по верхней части траектории-дуги не очень сильно искривлено, потому что дуга очень вытянутая. Это означает, что использование верхней дуги траектории для погруженного в воду весла тоже приведет к отбрасыванию воды назад и передаче импульса лодке вперед. Если это так, то отпадает необходимость в двух дополнительных спрямляющих движение механизмах, достаточно перевернуть сдвоенную на одном ведущем кривошипе пару лямбдаобразных механизмов П.Л. Чебышева (рис. 3).
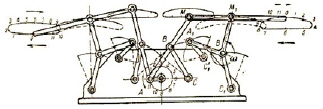
Рис. 3. Прототип – сложный механизм П.Л. Чебышева
Обобщая сказанное, можно сформулировать три основных вопроса, которые надо изучить подробно при анализе гребного механизма П.Л. Чебышева, схема которого приведена в книге И.И. Артоболевского и Н.И. Левитского [2].
1. Зачем нужны два механизма справа и слева от сдвоенной пары «лямбд»,
не изменяющие форму дуг?
Обратите внимание на похожие траектории с нижними почти прямолинейными отрезками и верхними дугами, которые показаны на чертеже сплошными линиями. Практически это одна и та же фигура. С технической точки зрения П.Л.Чебышев отодвинул эти две траектории от центральной части механизма вправо и влево на чертеже, то есть вперед и назад на созданной им лодке. Зачем? Для продольной устойчивости? Но продольную устойчивость движения лодки обеспечивает только передний гребной щиток, но не задний. Для уменьшения боковых габаритов? Вряд ли, потому что эффект не существенный. Не удается найти ответ на этот вопрос. Траекторию движения гребных весел вполне можно обеспечить без двух механизмов справа и слева от «лямбд». Эти два механизма сдвига гребной траектории не нужны для движения лодки по воде, не говоря о перемещении судна по отмели. Предлагаю убрать эти два механизма, сократив на приведенной схеме 10 рычагов и 14 шарниров. Остаются только две спаренные «лямбды» на общем ведущем кривошипе, то есть всего 5 рычагов и 7 шарниров, не считая неподвижного звена – корпуса. С технической точки зрения из кинематической схемы механизма исключили 67% рычагов и шарниров. Новый рычажно-шарнирный механизм сохранил одну степень свободы, рассчитанную по формуле П.Л. Чебышева: С = 3Р-2Ш=
= 3х5-2х7 = 15-14=1.
2. Зачем нужны удлинители гребных щитков-весел?
Ответ на этот вопрос не ясен. На обычной лодке весла опускаются в воду сбоку. Зачем П.Л. Чебышев перенес гребные щитки-весла вперед и назад? В новом техническом предложении удлинители щитков не нужны. Щитки-весла можно закрепить непосредственно на рабочих точках шатунов лямбдаобразных механизмов. Передача импульса от весел воде и от воды веслам будет происходить сбоку, как на обычной лодке. Вполне работоспособная схема технического решения, проверенная веками.
3. Главное! Зачем нужна траектория шага вверху для работы веслами по воде?
Траектория природного шага нужна исключительно для шагающего способа передвижения. В природе такая траектория реализует поступательное движение туловища человека или животного, предохраняя его от вибрационных и ударных нагрузок. Шагающая траектория нужна для тяжелых промышленных платформ, для шагающих экскаваторов, в которых ее нет, для новой техники, но никак не для лодки. Упор веслами происходит в воду. Ну, будет весло двигаться не по прямой линии, а чуть-чуть по дуге! Ничего страшного. В обычной лодке весла двигаются именно по дуге. Зачем нужна прямая линия движения для весел? Быть может, П.Л. Чебышев планировал увеличить коэффициент полезного действия движителя? Тоже вряд ли, потому что наиболее эффективен гребной винт, а не весла или гребное колесо. Если все рассуждения правильные, то не надо думать о смещении рабочей траектории вниз, а достаточно просто перевернуть сдвоенную пару «лямбд». При таком перевороте почти прямолинейный участок траектории щитка-весла выйдет из воды на воздух и станет пассивным, а дугообразный участок траектории, наоборот, погрузится в воду и станет активным. В этом суть предлагаемого нового технического решения, позволяющего существенно, в три раза упростить кинематическую схему гребного механизма. Причем не только гребного, но и шагающего. Даже если свободные рабочие концы шатунов с веслами упрутся в дно отмели под корпусом лодки, то судно просто прошагает по мелководью. Естественно, что прошагает не правильно, не как стопоходящая машина. Прошагает не поступательно. Но следует помнить, что шагающий способ движения не является основным для лодки-амфибии. Он нужен только для преодоления отмели сравнительно небольшой протяженности. Потом на большой глубине движитель автоматически превратится в весельный механизм без каких-либо дополнительных команд со стороны экипажа.
Вот такое замечательное свойство своего гениального лямбдаобразного механизма не увидел Пафнутий Львович Чебышев. Не увидел, потому что в XIX веке вопрос об освоении северных и труднопроходимых территорий не рассматривался, не был актуальным, в отличие от современности.
5. Новое применение механизма П.Л. Чебышева
После анализа кинематической схемы гребного механизма П.Л.Чебышева была предложена известная упрощенная схема сдвоенной пары «лямбд» на одном кривошипе, но установленная на лодку-амфибию по-новому (рис. 4).
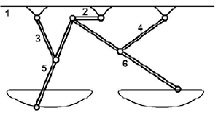
Рис. 4. Кинематическая схема «перевернутой спарки лямбд»
Новизна работы:
1) убираем механизмы переноса траектории;
2) сокращаем 10 рычагов и 14 шарниров;
3) закрепляем щитки-весла на шатунах «лямбд»;
4) главное, переворачиваем «лямбды» – о таком никто не думал, боясь нарушить принципы правильного шага, которые для лодки и для гребли по воде не нужны.
На неподвижном звене-корпусе 1 механизма и лодки-амфибии шарнирно закреплены общий ведущий кривошип 2 и два коромысла 3 и 4. К общему ведущему кривошипу и к каждому коромыслу шарнирно прикреплены шатуны 5 и 6. Это известная схема сдвоенной пары лямбдаобразных механизмов П.Л.Чебышева. Однако новым применением этой кинематической схемы является ее переворот в вертикальном направлении так, что корпус механизма с неподвижными шарнирами ведущего кривошипа и двух коромысел оказывается вверху, а природные шагающие траектории свободных точек шатунов переворачиваются и располагаются внизу.
Собранный макет такой комбинации механизмов показал возможность лодки не только плавать, но и передвигаться по отмели. Конечно, доказано, что коэффициент полезного действия гребного корабельного винта намного больше, чем весел. Но гребной винт требует «чистой» воды, для него страшны отмели, болота. Лодка на веслах, наоборот, прекрасно преодолевает заболоченную местность, отмели, шугу, песчаные пляжи с лужами. Если сдвоенную пару лямбдаобразных механизмов перевернуть, то непосредственно на концы шатунов можно установить весла-опоры, которые могут и грести по воде, и шагать по отмели. При таком перевороте механизма теперь уже верхний прямолинейный участок траектории становится пассивным, что не обычно для применения в шагающих машинах, да и вообще в технике, где часто требуют и добиваются движения точки по прямой линии. В таком перевернутом механизме теперь уже нижний участок дуги на траектории становится рабочим, отбрасывает воду назад или ходит по отмели. Если глубина водоема большая, то весла на концах шатунов отбрасывают воду. На отмели эти же весла с опорами шагают по дну водоема, пока лодка-амфибия не выйдет на «чистую» воду. Для предлагаемого нового движителя лодки-амфибии требуется, чтобы на пассивном прямолинейном участке траектории весла опоры полностью поднимались над водой. Это означает, что ватерлиния лодки-амфибии должна находиться немного ниже прямолинейного верхнего пассивного участка движения конца шатуна лямбдаобразного механизма П.Л. Чебышева. Схема движения лодки-амфибии по отмели и по «чистой» воде показана ниже на рис. 5.
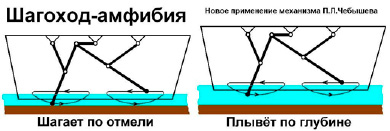
Рис. 5. Принцип движения амфибии по отмели и воде
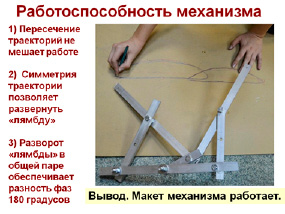
Рис. 6. Техническая реализация физических принципов движения
Теоретический расчет и уже созданные макеты доказывают одну степень свободы у предложенной пары механизмов [4, 5].
Для обеспечения шагающего способа передвижения лодки-амфибии по отмели одной точки опоры мало. Однако четыре точки опоры можно не требовать, достаточно двух точек, потому что шагающий способ передвижения лодки-амфибии не является основным. Лодка-амфибия на отмели будет совершать небольшие колебательные движения вверх и вниз при передвижении вперед шагающим способом, пока не выйдет на глубоководье. Это не критично для легких конструкций.
6. Изготовление действующего макета
Для иллюстрации работоспособности технического предложения был изготовлен макет гребного механизма с одновременным приданием ему функции опор шагающего механизма (рис. 6).
Сначала была проведена черновая отработка макета с проверкой правильности размеров рычагов, регулировки зазоров и с выявлением особенностей, которые нельзя увидеть теоретически [6-10]. Например, оказалось, что природные шагающие траектории рабочих точек на концах шатунов пересекаются приблизительно на 20% общей длины. Для практического применения на лодке-амфибии такое пересечение не существенно по трем причинам. Во-первых, пересекающиеся траектории разнесены по ширине и не мешают двигаться шатунам даже с закрепленными на них веслами-опорами. Во-вторых, разворот одного лямбдаобразного механизма в общей паре на 180 градусов относительно другого повернул соответственно траекторию рабочей точки, но не изменил ее вид из-за симметричности. В-третьих, взаимный разворот лямбдаобразных механизмов обеспечил разность фаз движения двух рабочих точек шатунов тоже 180 градусов. Кинематическая и механическая схема оказалась работоспособной.
Преимуществом предлагаемого способа передвижения лодки-амфибии является простота и надежность технического решения. Четырехзвенный механизм П.Л. Чебышева хорошо изучен, содержит всего три рычага, четвертым является неподвижное звено – корпус лодки-амфибии. Фактически в этом механизме нечему портиться. Нарушения работоспособности возможны, скорее всего, в приводе для вращения ведущего кривошипа, в механизме регулировки скорости вращения вала, в двигателе транспортного средства, в системе управления, но никак не в предлагаемом движителе в виде весел-опор.
7. Гидродинамическое обоснование
Предлагаемый механизм позволяет жестко закрепить весло на шатуне. При движении шатуна в воде угол атаки весла изменяется. Получить поступательное движение весла в воде не получается. В этом отношении предлагаемый механизм проигрывает гребному механизму П.Л. Чебышева. Закономерен вопрос, сильно ли проигрывает? И вообще, проигрывает ли? Оказалось, что не проигрывает (рис. 7). Для доказательства был изготовлен большой лямбдаобразный механизм с длиной природной траектории шага приблизительно 1 метр. Траектория рабочей точки шатуна была начерчена на миллиметровой бумаге. На дуге, как рабочей части траектории при движении лодки-амфибии по воде, были обозначены углы атаки шатуна, а затем был построен график изменения угла атаки вдоль дуги траектории. Прямолинейный участок траектории исследовать не надо, потому что на нем весло выходит из воды и перемещается вперед относительно лодки-амфибии по воздуху. Построенные траектории были изучены более детально на предмет изменения угла атаки шатуна при движении в воде.
Оказалось, что лямбдаобразный механизм П.Л. Чебышева обеспечивает прямой угол атаки только в одном положении, приблизительно на одной трети удаления от начала дуги. До этого угол атаки изменяется приблизительно от 880, а после этого положения – до 132 градусов (рис. 8).
Для максимального выравнивания угла атаки достаточно установить весла под углом приблизительно 140 неподвижно относительно шатунов, тогда угол атаки будет изменяться более равномерно в диапазоне от 640 до 1160. Это означает, что поток воды от весел снизится не более чем на 10%, да и то в самом конце дуги траектории. Следовательно, нет смысла создавать сложные механизмы для стабилизации прямого угла атаки весла.
Для сравнения был изучен вариант установки весла на шатун с использованием традиционного прямолинейного участка траектории. Изучение проводилось измерением угла атаки весла на шатуне с последующим определением рационального установочного угла для получения наибольшей тяги. Изменение угла атаки весла без установочного угла показано на рисунке 9.

Рис. 7. Отбрасывание воды веслами, автономные испытания
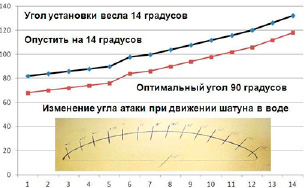
Рис. 8. Определение рационального установочного угла весла на шатуне
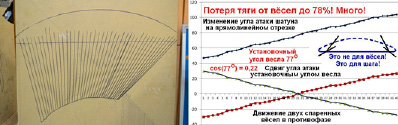
Рис. 9. Критика гидродинамических свойств лодки П.Л. Чебышева

Рис. 10. Движение макета амфибии по отмели
Если использовать весло на прямолинейном участке траектории, то установочный угол весла будет 770, что приведет к потере тяги до 78%.
Заключение
1. Предложено новое применение двух спаренных лямбдаобразных механизмов П.Л. Чебышева как движителя лодки-амфибии.
2. Проведено механическое и гидродинамическое обоснование работоспособности устройства.
3. Изготовлен и испытан макет действующего привода для доказательства правильности полученных результатов (рис. 10).
Библиографическая ссылка
Жукова В.С. МЕХАНИКА И ГИДРОДИНАМИКА НОВОГО ДВИЖИТЕЛЯ ЛОДКИ-АМФИБИИ. (ВИДЕОРОЛИК О РАБОТЕ: HTTPS://YOUTU.BE/ZRH0BBOQPTQ) // Международный школьный научный вестник. 2018. № 5-3. ;URL: https://school-herald.ru/ru/article/view?id=695 (дата обращения: 04.07.2026).