
Данная статья является реферативным изложением основной работы. Полный текст научной работы, приложения, иллюстрации и иные дополнительные материалы доступны на сайте V Международного конкурса научно-исследовательских и творческих работ учащихся «Старт в науке» по ссылке: https://school-science.ru/5/11/34042
Актуальность
В современном мире уже созданы и используются десятки миллионов роботов. Человек всегда стремился создать себе автоматического помощника. Интересно, что еще в 1-м веке до н.э. Гомер писал в «Иллиаде» о сотворенных из золота служанок, способных говорить и мыслить. Сегодня разум, которым наделяют роботов получил название – исскуственный интеллект. Приблизительно 400 годом до н.э. древнегреческому инженеру-механику Архиту Тарентскому приписывают разработку и создание механического летающего голубя. Само слово «робот» придумали в 1920 году чешские писатели Карел Чапек и его брат Йозеф. А понятие робототехники впервые в своих рассказах использовал в своем рассказе «Лжец» писатель-фантаст Айзек Азимов. Это было в 1941 году
Робототехника – прикладная наука, занимающаяся разработкой автоматизированных систем Робототехнику подразделяют на промышленную, строительную, медицинскую, космическую, авиационную, бытовую. Применение робота на производстве способствует эффективному решению трех важнейших проблем производства:
- повышение производительности труда;
- улучшение условий труда;
- оптимизация использования человеческих ресурсов.
Промышленные роботы позволили эффективнее выполнять непосильную человеку по трудоемкости и точности работы: загрузку/разгрузку, укладку, сортировку, перемещение заготовок от одного робота к другому или готовых изделий на склад и т.п.. При помощи роботов и их комплексов руководители предприятий смогут создавать высокоэффективное производство с минимальными издержками и высоким качеством продукции, что значительно увеличивает их чистую прибыль Таким образом, для многих развитых предприятий подобный подход стал основой стратегии работы на долгие годы. Используя знания и опыт отечественных инженеров, следует развивать отечественную робототехнику при помощи национальных проектов, которые должны приниматься и курироваться на федеральном уровне.
Развитие роботов требует от человека умения проектировать и обслуживать современное оборудование. Для этого нужны грамотные, хорошо подготовленные кадры. Обучение которых лучше начинать еще со школьного возраста на уроках физики, математики, информатики и робототехники.
Практически каждый из нас имеет дело с домашними роботами. Это программируемые бытовые приборы: стиральные машины, пылесосы, каждый современный автомобиль включает в себя автоматизированные системы. Меня заинтересовал принцип работы этих технических устройств, какие физические явления и законы лежат в их основе. Для чего я решил самостоятельно создать робота., способного двигаться по заданной траектории и выполнять функцию перевозчика.
Цель: создать робота, способного двигаться по заданной траектории и выполнять функцию перевозчика. Описать принцип работы, используемого в роботе инфракрасного датчика. Рассмотреть инфракрасное излучение как физического явление.
Объект: робот-перевозчик
Предмет: Изучение физических принципов работы датчиков робота. Инфракрасное излучение как физического явление.
Для достижения поставленной в курсовой работе цели решались следующие задачи:
- собрать робот-перевозчик на основе платформы Arduino;
-написать программу, позволяющую роботу передвигаться по заданной траектории и выполнять функцию перевозчика.
- изучить физический принцип работы ИК-датчика
Апробация. Результаты работы были представлены на III Всероссийский фестиваль по робототехнике в городском округе Коломна Московской области, Раменском робототехническом фестивале «Роботема» и X Всероссийском робототехническом фестивале «Робофест – 2018».
Планируемый результат:
Манипуляции производимые роботом:
Движение по заданной траектории. Робот движется по линии черного цвета.
Робот способен различать объекты черного и белого цвета.
При нахождении робота рядом с объектом (кубиком черного цвета), он останавливается и захватывает его. Затем движение продолжается до встречи со следующим объектом.
Захваченный объект робот переносит в точку назначения (перекрестие) и оставляет там.
Основные этапы выполнения проекта:
Сборка робота-перевозчика
Инструменты: отвертка, клей с использованием термопистолета, металлический конструктор, подручный материал.
Оборудование: ПК, кубики белого и черного цвета, поле передвижения, робот – перевозчик.
Используемые материалы:7 ИК-движения, 2 аккумулятора на 4200А, плата Arduino UNO, плата расширение Sensor Shleld v5.0, 2 серво двигателя MG95, 2 шаговых двигателя, 2 драйвера L298N, провода и металлический конструктор для урока труда и подручный материал.

Рис.1. Модель робота-перевозчика
Технические характеристики датчика ТСRT5000
Напряжение питания: 3,3 - 5 В
Потребляемый ток: 10 мА
Цифровой вывод (0 или 1)
Физические размеры
Модуль (Д х Ш х В): 42 х 10 х 13 мм
Модуль (Keyestudio) (Д х Ш х В): 47 х 11 х 12 мм
Сборка
Сначала на платформе собираем двигатели с колесами. Потом крепим управляющие платы и контроллеры. Подключаем двигатели к контроллеру, а контроллер к плате Arduino UNO. Устанавливаем на платформу верхнюю часть с сервоприводами. К сервоприводам крепим толкающие тяги из линейки и металлического конструктора. К тягам крепим пластиковые пластины для захвата и выгрузки. На верхнюю часть устанавливаем аккумуляторы и подключаем к плате Arduino UNO. В задней части платформы крепим упорную планку из линейки. Подключаем сервоприводы к плате Arduino UNO. Затем открываем программу Arduino и создаем скейтч сначала для следования по линии, потом для определения цвета кубиков и их количества, которое надо привезти, захват и выброс их на перекрестке.
Программное обеспечивание: программа Arduino, Персональный компьютер.
Рассмотрим физический принцип работы датчиков.
В настоящее время разработано множество датчиков. С их помощью работ получил новое качество, названное «очувствлением». Он стал получать информацию о внешней среде, а затем анализируя данную информацию выбирать оптимальный вариант действий. Например, обрел навыки, позволяющие взять деталь и обойти с ней препятствие. Происходит такое действие благодаря микропроцессорной обработке полученной информации, которой в дальнейшем руководствуется робот.
Работа датчика движения основана на анализе волн различных типов (акустических, оптических или радиоволнах), поступающих на датчик из окружающей среды.
В зависимости от типов используемых волн датчики движения делятся на:
-инфракрасные
-ультразвуковые
-фотоэлектрические
-микроволновые
-томографические (радиоволны).
В зависимости от того инициирует ли датчик сам эти волны или анализирует их после отражения, или только получает волны из вне, датчики делятся на пассивные, активные и комбинированные (одна часть посылает волны, а другая отдаленная от нее, получает).
Каждый робот, способный ездить, летать или плавать, должен видеть препятствия, находящиеся у него на пути. Чтобы робот смог это сделать, ему необходимы соответствующие датчики. В английской литературе такие устройства называют proximity sensor, мы же их будем называть датчиками препятствия.
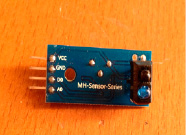
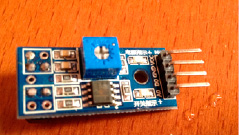
Рис. 2. Датчик MH-Sensor-Series
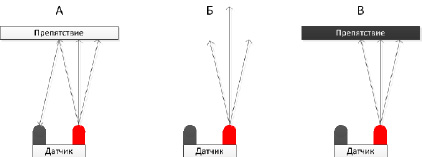
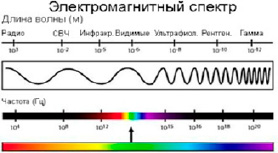
Рис. 3. Электромагнитный спектр
Наш датчик линии имеет сразу два выхода - аналоговый и цифровой, что позволяет ему не только отличать черное от белого, но и «видеть» градации серого. Это может пригодиться, если мы хотите реализовать какую-то более сложную логику или использовать датчик в других экспериментах.
В роботе использован самых распространенных датчиков препятствия, который работает по принципу отражения. Устроен он очень просто. Датчик содержит направленный источник света и детектор света. Источником часто служит инфракрасный светодиод с линзой, а детектором — фотодиод.
Светодиод на датчике постоянно включен и излучает узкий пучок света в прямом направлении. Если перед датчиком есть препятствие (рисунок А), то на детектор попадает отраженный свет от источника, и на выходе датчика появляется положительный импульс. В противном случае, если препятствия нет, то датчик молчит (рисунок Б). Есть и третий вариант, когда препятствие есть, но свет от него не отражается! На рисунке В изображен как раз такой случай. Получается, матовую черную поверхность робот не увидит.
Источником ИК-излучения являются светодиод и фотодиод.
Инфракрасное излучение – это разновидность электромагнитного излучения,, занимающего в спектре электромагнитных волн в диапазоне от 0,74 до 340мкм. Самым мощным естественным источником инфракрасного излучения является Солнце. Любое тело, нагретое до определенной температуры, излучает тепловую энергию в инфоракрасном диапазоне спектра электромагнитных волн и может передавать эту энергию посредством лучистого теплообмена другим телам. Электромагнитный спектр представлен на рисунке 3.
Сэр Фредерик Вильям Гэршел (1738-1822) открыл существование инфракрасного излучения около 1800 года после измерения температуры каждого цвета в спектре прохождения солнечного света через стеклянную призму. Он обнаружил, что наивысшая температура была в области, начинающейся сразу за красной областью спектра. Он продолжил эксперименты с этими «тепловыми лучами» (позже названными инфракрасными) и открыл, что они отражались, преломлялись, поглощались и передавались точно так же, как и обычные лучи видимого света.
Инфракрасные лучи широко распространены в жизни человека и нашли свое применение в разных сферах: Военное дело. Современные ракеты и боеголовки, способные самостоятельно наводиться на цель, снабжены приборами ночного видения, которые являются результатом применения инфракрасного излучения. Термография. Инфракрасное излучение применяют для изучения перегретых или переохлажденных местностей. Инфракрасные снимки также применяются в астрономии для обнаружения небесных тел. Быт. Большую популярность получили инфракрасные обогреватели, функционирование которых направлено на нагрев предметов интерьера и стен. Затем они отдают тепло пространству. Дистанционное управление. Все существующие пульты для телевизора, печей, кондиционеров и т.д. снабжены инфракрасными лучами. В медицине инфракрасными лучами проводят лечение и профилактику различных заболеваний.
Принцип действия устройств, используемых в данной конструкции робота основан на целом ряде физических явлений. Мы рассмотрели лишь одно - ИК излучение. В дальнейшем я планирую изучить полупроводниковые переходы, на которых основан принцип работы светодиода и фотодиода . и др.физические явления.
Заключение
Можно выделить несколько направлений использования роботов в изучении физики:
• Робот как объект изучения. Изучение физических принципов работы датчиков, двигателей и других систем.
• Робот как средство измерения в традиционном эксперименте. Датчики используются как измерительная система в физическом эксперименте. Датчики используются как измерительная система в физическом эксперименте с обработкой фиксации его результатов в различных видах.
• Робот как средство постановки физического эксперимента. Комплексное использование двигателей, систем оповещения, датчиков в демонстрационном и лабораторном эксперименте.
• Робот как средство учебного моделирования и конструирования.
Библиографическая ссылка
Моисеев И.С. ФИЗИЧЕСКИЕ ОСНОВЫ РОБОТОТЕХНИКИ. РОБОТ-ПЕРЕВОЗЧИК // Международный школьный научный вестник. 2018. № 5-3. ;URL: https://school-herald.ru/ru/article/view?id=697 (дата обращения: 25.06.2026).