
Раньше космос был уделом больших корпораций, запуск космических аппаратов стоил больших ресурсов. Но время не стоит на месте, технологии развиваются, и сейчас на передовую позицию выходят частные космические организации, которые стремятся популяризировать космонавтику среди молодежи. Недавно я познакомился с OrbiCraft-Pro, формата CubeSat малых космических аппаратов. Его система позиционирования вдохновила меня на создание модели электромагнитной стабилизации в домашних условиях.
Цель: Создать модель электромагнитной стабилизации спутника.
Этапы:
I. Изучение принципов работы систем стабилизации космических аппаратов.
II. Создание прототипа и окончательного устройства для моделирования.
1. Решение первоначальных задач.
2. Создание прототипа:
· Разработка и сборка электронного модуля.
· Сборка прототипа.
· Испытания прототипа.
· Выявление минусов.
3. Создание опытного образца
· Разработка и сборка электронного модуля.
· Сборка опытного образца.
· Испытания опытного образца.
· Определение оптимального алгоритма управления катушками для уменьшения энергозатрат.
III. Преимущества проекта.
1.1. Изучение принципов работы систем стабилизации космических аппаратов
Для того чтобы создать опытный образец, сначала я решил разобраться какие вообще бывают системы стабилизации. Наиболее рациональной для создания я посчитал стабилизацию спутников с помощью магнитов. Электромагнитная стабилизация, как уже понятно из названия, основана на использовании электромагнитов и магнитного поля Земли. Именно с помощью него наноспутники типа CubeSat стабилизируют свое положение. Пример наноспутника формата CubeSat представлен в приложении 1 (рисунок 1). Принцип работы данной системы заключается в использовании электромагнитов на поверхности спутника: включая в нужный момент определенную пару электромагнитов можно добиться стабильного положения спутника.
2.1. Создание прототипа
и окончательного устройства
для моделирования
2.1.1. Решение первоначальных задач

Перед тем как приступить к реализации проекта, сначала нужно было решить первичные проблемы: среда, в которой будет находиться аппарат, его внешняя форма, проведение расчетов, изготовление электромагнитных катушек и выбор источника внешнего магнитного поля. В качестве среды для испытаний была выбрана вода, находящаяся в небольшой емкости. Выбор формы модели исходил из среды, в которой она будет находиться, поэтому, для уменьшения сопротивления воды, была выбрана форма шара. Ее оболочку было решено сделать из прозрачного подвесного шара. В качестве внешнего магнитного поля были выбраны неодимовые магниты. Для намотки катушек я сделал намоточный станок из LEGO Mindstorms. Фотографии намоточного станка и катушек представлены в приложении 2 (рисунок 1,2).
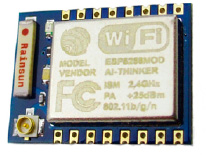
2.1.2. Создание прототипа

Сначала я решил собрать прототип, чтобы на нем посмотреть все недостатки нашего концепта. Для того чтобы аппаратом можно было управлять удаленно, в качестве контроллера был взят Wi-Fi модуль ESP-8266. Была разработана, а затем спаяна электронная схема. В качестве источника питания был выбран аккумулятор из портативной зарядки (Power Bank). Катушки управлялись попарно, то есть вдоль одной оси и имелась возможность менять полярность. Затем мы приклеили все катушки на места и плату управления с аккумулятором на них. Фотографии схемы платы управления и самой платы управления представлены в приложении 3 (рисунок 1,2) Для упрощения программного кода, мы использовали библиотеку Blynk для Arduino. Прототип был готов, оставалось его протестировать. Во время испытаний были выявлены недочеты: выбранный аккумулятор имел металлическую оболочку и притягивался к внешне-установленным магнитам, а также отсутствие центровки у прототипа не позволило проверить стабилизацию по вертикальным катушкам. Но основная концепция стабилизации на электромагнитах была успешно проверена. Фотография готового прототипа представлена в приложении 3 (рисунок 3).
2.1.3. Создание опытного образца

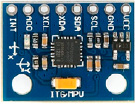
Создание опытного образца мы начали с решения минусов, выявленных в ходе испытаний прототипа, а именно: было решено заменить аккумулятор и уделить повышенное внимание центровке. Работы мы начали с чертежа схемы и ее сборки. В качестве контроллера выбрали более мощный вариант предыдущего, а именно Wi-Fi модуль ESP – WROOM – 32. Его мощностей хватило на обработку данных с гироскопа MPU 6050 и осуществление ПИД-регулирования уровнем напряжения на электромагнитах. График регулирования стабилизации опытного образца представлен в приложении 4 (рисунки 1-3). Для удаленного управления образцом на Wi-Fi модуле был развернут веб-сервер. Управление катушками было выбрано раздельным, позволяющее управлять напряженностью и полярностью для каждого электромагнита отдельно. Затем мы собрали опытный образец. Фотографии схемы платы управления и самой платы управления представлены в приложении 4 (рисунок 4,5) Примененный аккумулятор на 900mA/h не позволял проводить продолжительные испытания. Поэтому мы заменили его на более емкий, и из-за этого увеличилась масса образца, вследствие чего магнитного момента электромагнитных катушек не хватало на вращение шара в воде. В связи с этим было решено изготовить станину и проводить испытания на ней, и ограничиться двумя осями регулирования. Фотография готового опытного образца и станину представлены в приложении 4 (рисунок 6, 7).
2.2. Преимущества проекта
Преимуществами нашего проекта является:
1. Перспективность: с помощью нашей модели можно увидеть, как ведет себя спутник с электромагнитной стабилизацией, и смоделировать поведение спутника в трехмерном пространстве.
2. Особенность: наш образец позволяет модернизировать алгоритм управления без перепрограммирования устройства, так как веб-сервер выдает информацию о положении образца в пространстве и принимает команды на управление электромагнитами. Таким образом, алгоритм управления можно реализовать на JavaScript в веб-странице, загрузив ее «по воздуху» на устройство.
3. Простота: на нашем опыте вы можете убедиться, что собрать такой образец может и школьник, ведь для этого не нужны какие-то глубокие познания в проектировании космических аппаратов.
4. Дешевизна: в наше время вопрос финансирования какого-либо проекта стоит если не на первом, то на втором месте это точно. И часто именно из-за нехватки денежных ресурсов, некоторые амбициозные проекты откладывают в долгий ящик, что не скажешь о нашей модели.
Приложение 1
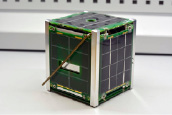
Наноспутник SiriusSat формата CubeSat
Приложение 2

Рис. 1. Плата управления прототипа
Приложение 3

Рис. 1. Намоточный станок
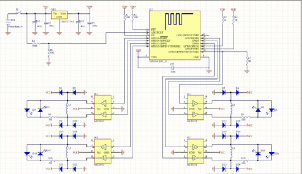
Рис. 2. Схема платы управления прототипа

Рис. 3. Прототип модели
Приложение 4
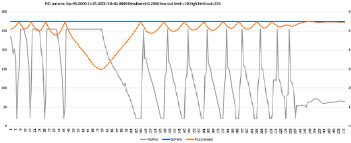
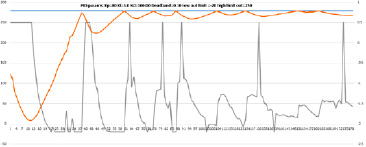
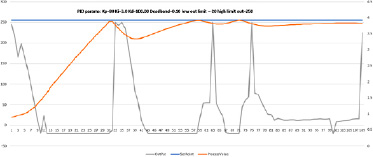
Рис. 1-3. Графики регулирования стабилизации опытного образца: синяя линия – установленная позиция; оранжевая линия – текущая позиция; серая линия – значения на ШИМ
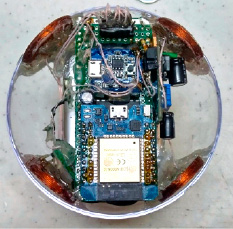
Рис. 4. Плата управления опытного образца
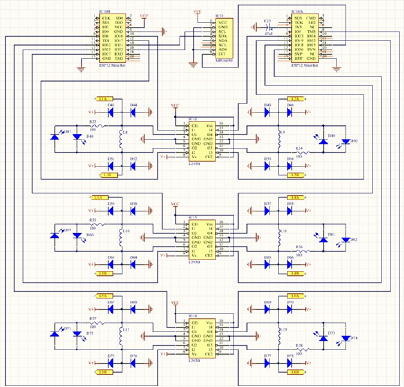
Рис. 5. Схема платы управления опытного образца

Рис. 6. Готовый опытный образец

Рис. 7. Станина с готовым опытным образцом
Заключение
Итогом нашей работы стала работоспособная модель электромагнитной стабилизации спутника. Во время изготовления этой модели мы познакомились:
· С теоритической и практической сторонами электромагнетизма.
· С основными принципами написания программ для Wi-Fi модуля ESP-32 на платформе Arduino.
· С разработкой и изготовлением электронных устройств.
· С программированием Web-приложений.
Из недостатков можем отметить:
· Ошибочный расчет размеров электромагнитных катушек.
· Наличие только одного гироскопа создало ограничение для определения положения устройства в любых плоскостях трехмерного пространства.
В будущем планируется:
· Сделать внешние электромагнитные катушки для создания однородного магнитного поля и уменьшения колебаний модели.
· Решение проблем с гироскопом.
Библиографическая ссылка
Оразов И.В. ИССЛЕДОВАНИЕ СИСТЕМ СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА: СОЗДАНИЕ МОДЕЛИ ЭЛЕКТРОМАГНИТНОЙ СТАБИЛИЗАЦИИ СПУТНИКА // Международный школьный научный вестник. 2018. № 5-4. ;URL: https://school-herald.ru/ru/article/view?id=722 (дата обращения: 30.07.2026).