
Манипуляционный робот – автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления, которая служит для выполнения в производственном процессе двигательных и управляющих функций. Такие роботы производятся в напольном, подвесном и портальном исполнениях. Сам манипулятор – это механизм для изменения пространственного положения объектов. Значение слова «манипулятор» закрепилось за словом с середины XX века, благодаря применению сложных механизмов для работы с опасными объектами в атомной промышленности.
В настоящее время происходит бурное развитие робототехники. Но разработками в этой области могут заниматься не только большие корпорации, ученые и инженеры, но и обычные школьники. Большой интерес для робототехники представляют конструкторы Arduino. Платы Arduino – это радио – конструктор, на языке Виринг (С++) и воплощения в жизнь технических идей.
Цель проекта: изготовить действующую модель робота-манипулятора. Для этого были поставлены следующие задачи:
• разработать обучающую руку – манипулятор с минимальными затратами средств, не уступающую зарубежным аналогам;
• в качестве механизмов манипулятора использовать сервоприводы;
• управление механизмами манипулятора осуществить с помощью радио – конструктора Arduino Nano;
• разработать программу в среде программирования Arduino для пропорционального управления сервоприводами.
Для выполнения поставленной цели и задач нашего проекта необходимо было изучить виды существующих манипуляторов, техническую литературу по этой теме и аппаратно-вычислительную платформу Arduino [1].
История создания и использования робота-манипулятора
Идея создания роботов – механических устройств, своим внешним видом и действиями подобных людям или каким-либо живым существам, увлекала человечество с незапамятных времен. Архимед построил множество невероятных в то время приспособлений самым эффективными из которых стала «Лапа Архимеда»- уникальная подъемная машина и прообраз современного крана и манипулятора. Она была очень похожа на рычаг, выступающий за городскую стену, оснащенный противовесом. Этот манипулятор, под управлением обученного машиниста, захватывал нос пристающего к берегу корабля и переворачивал его.
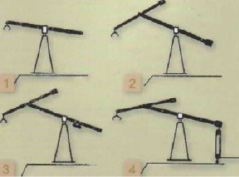
Рис. 1. «Лапа Архимеда»
1.2. Устройство манипулятора
1.2.1. Составляющие манипулятора
Манипулятор состоит из звеньев – несгибаемых частей, соединенных между собой шарнирами. Шарниры – части, соединяющие между собой звенья манипулятора, обеспечивая им возможность вращательного или линейное движение. Различают несколько видов шарниров: цилиндрический, шаровой и шарнир угловых осей (см. рис. 1). Разные виды шарниров позволяют производить разные виды движения:
• цилиндрический – вокруг общей оси;
• шаровой – вокруг общей точки;
• угловых осей – с равной угловой скоростью.
а б в
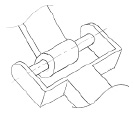

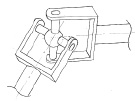
Рис. 2. а – цилиндрический шарнир; б – сферический шарнир; в – шарнир угловых осей
а б
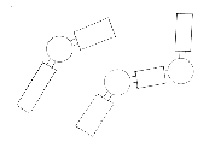
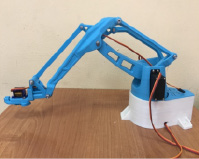
Рис. 3. а – пример разомкнутой и замкнутой кинематических пар; б – замкнутые кинематические пары нашего манипулятора
Шарнир также является примером кинематической пары в манипуляторе.
Кинематические пары – это два соединенных между собой звена, допускающие какое-либо относительное перемещение. Кинематические пары образуют кинематические цепи, которые бывают замкнутыми и разомкнутыми (рис.2). Замкнутой цепью называют ту, все звенья которой входят в состав как минимум двух кинематических пар. Кинематическая цепь, в которой есть звенья, входящие лишь в одну пару, называется разомкнутой [2].
Однако, вне зависимости от вида кинематической цепи, ее замыкает одно условное неподвижное звено. Один его конец неподвижно крепится к основанию робота, а его вторая половина соединена со следующим звеном, от которого идет еще одно, и так продолжается до самого «рабочего органа» манипулятора – его ключевой части.
1.2.2. Рабочий орган – это исполнительная система манипулятора, предназначенная для выполнения различных действий. Она может представлять собой сверло, схват, фрезу, что угодно, в зависимости от целевого назначения робота. В нашем проекте – это схват, который сжимается, захватывая предмет, поворачиваясь, переносит его на другое место и разжимается (рис. 4).


Рис. 4. Пример работы нашего манипулятора
1.2.3. Рабочая зона манипулятора. У большинства оно предполагает изменение положения, но каждый робот имеет границы, предел возможностей. Это своеобразный контур, за пределами которого он не сможет работать, так как попросту туда не дотягивается. Пространство, находящееся внутри этого контура называется рабочей зоной манипулятора [3]. На рис. 3 это заштрихованная область, а линия, ограничивающая ее – траектория движения рабочего органа, когда угол между всеми звеньями равен 180°.
а б
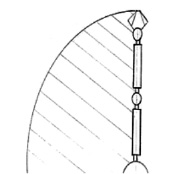
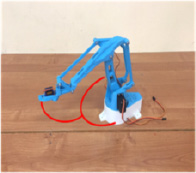
Рис 5. а – схема рабочей области; б – схема рабочей области нашего манипулятора
1.2.4. Приводы. Но никакой рабочей зоны не было бы и в помине, не будь манипулятор подвижен. Движение роботу обеспечивают специальные приводы, расположенные внутри него или, иногда, на поверхности. Базовый состав привода – двигатель и устройство управления данным приводом. Главное качество частей привода – легкость. В движение исполнительную часть и звенья приводят двигатели. Их может быть несколько и расположены они в разных местах, так как расположение двигателя определяется рациональностью его нахождения в данной части робота. Различают пневматические, гидравлические и электрические приводы. Они различаются мощностью и стоимостью, зависящей от сложности рабочего принципа.
1.2.5. Грузоподъемность. Однако, вне зависимости от подвижности манипулятора, каждый из них обладает своей грузоподъемностью, которая не менее, а в некоторых областях более важна при конструкции робота. Грузоподъемность показывает, насколько тяжелым грузом сможет оперировать робот, при этом не подвергая себя и манипулятор каким-либо механическим повреждениям и неполадкам. Этот параметр задается при создании робота и зависит от его размера, строения и предназначения.
1.2.6. Подвиды современных роботов:
• Промышленные роботы
• Медицинские роботы
• Бытовые роботы
• Роботы для обеспечения безопасности
• Боевые роботы
• Роботы-учёные
Выполнение работы
За основу взяли, манипулятор, представленный на сайте ROBOTON. Преимущество этой конструкции в том, что площадка для размещения захвата всегда расположена параллельно рабочей поверхности.
Материалы и инструменты
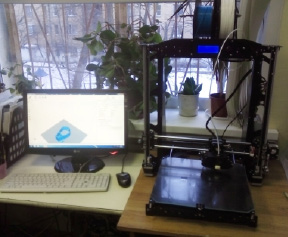
Изучив литературу по теме и используя готовые чертежи, нами были изготовлены детали для манипулятора на 3Д принтере (прил. 1). Это потребовало больших затрат времени и точности. Основание изготовляли 8 часов, пришлось переделывать дважды из за дефектов печати. Сначала собрали базу – основание, на котором робот вращается вокруг своей оси по азимуту(прил. 2). Затем собрали клешню, а после и сам многорычажный механизм крана. При его сборки необходимо убедиться, что каждый узел очень легко вращается. Иначе сервомоторам не хватит мощности двигать всю конструкцию. Манипулятор состоит из звеньев – несгибаемых частей, соединенных между собой шарнирами. В нашем проекте использованы цилиндрические шарниры (рис. 6).

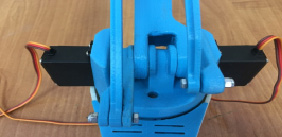
Рис. 6. Цилиндрический шарнир
Механическая начинка манипулятора
Движение роботу обеспечивают специальные приводы, расположенные внутри него или, иногда, на поверхности. Это двигатель и устройство управления данным приводом. В манипуляторах используют электромеханические, гидравлические, пневматические или комбинированные приводы. Нами используются электромеханические. У нас 4 сервопривода: 1 в основании, 1 для работы основной стрелы, 1 для вспомогательной. 1 для схвата (прил. 3). Используется импульсный блок питания ROBITON – сила тока 2000мА и напряжение от 3 до 12В [4].
Электронная начинка манипулятора
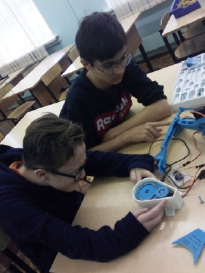
Для программирования использовали Arduino. Это специальная плата и программа, в которой написали код для контроллера на специализированном языке[5].Для работы с манипулятором использовали плату Arduino и совместимую плату расширения для подключения сервоприводов.
Подключили плату Arduino UNO с помощью кабеля USB к компьютеру, установили необходимые настройки в среде программирования, составили программу (скетч) для работы сервоприводов используя библиотеки Arduino. Скомпилировали (проверили) скетч, затем загрузили в контроллер. Управлять манипулятором можно с помощью ПК и (или) джойстиков. Нам больше нравится работать с джойстиком (прил.4).
Заключение
Нами был создан действующий экспонат «Робот-манипулятор», который предназначен для для перемещения в пространстве объектов, находящихся в схвате манипулятора. Манипулятор снабжен роботизированной рукой, которая сжимается и разжимается. Движение включают в себя: запястье 120°, локоть 300°, базовое вращение 160°
Преимущество этой конструкции в том, что площадка для размещения захвата всегда расположена параллельно рабочей поверхности. Тяжелые двигатели расположены у основания, усилия передаются через тяги.
Робот манипулятор с помощью схвата может перемещать небольшие предметы: ручку, маркер, ластик и т.д. Работаем над перемещением шариков по направляющей.
Практическая значимость выполненной модели в том, что этот робот может использоваться в промышленности, например, на конвейере (большего размера), для людей с ограниченными возможностями, крепясь на инвалидном кресле и т.д.

Рис. 7. Программирование манипулятора и работа с ним
Характеристики руки манипулятора:
• Высота: 260мм.
• Рабочая зона (при полностью вытянутом манипуляторе): от 170 мм до 350 мм вокруг основания
• Максимальная грузоподъемность на вытянутой руке: 200 г
• Потребляемый ток, не более: 1 А.
Приложение 1
Моделирование на 3Д принтере

Приложение 2
Сборка основания манипулятора
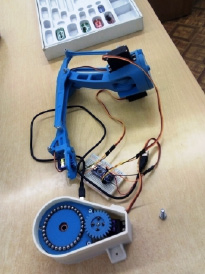
Приложение 3
Сборка и настройка приводов
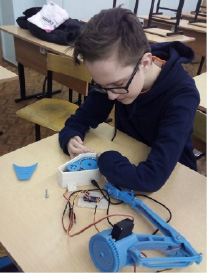

Приложение 4
Демонстрация работы манипулятора


Библиографическая ссылка
Борисов Н., Моисеев Д., Копейкин Р., Третьяков А. РОБОТ-МАНИПУЛЯТОР // Международный школьный научный вестник. 2019. № 1-3. ;URL: https://school-herald.ru/ru/article/view?id=902 (дата обращения: 04.07.2026).