
Актуальность. Недавно я видела фильм про снайперов, в котором один из стрелков, прицеливаясь, использовал незнакомое для меня приспособление – дальномер. Я захотела выяснить, каков принцип его работы. Оказалось, что он во многом связан с одним из разделов моего любимого предмета – геометрией. Я решила досконально изучить использование тригонометрии при определении расстояния до объектов, а также конструкцию оптического дальномера и попробовать сделать его самостоятельно.
Цель: изучить методы использования тригонометрии при определении расстояния до объектов, и на опытах доказать наглядность и удобство практического использования.
Задачи:
• изучить важность определения расстояния:
• изучить виды дальномеров, принцип их работы и конструкцию;
• получить информацию об областях использования дальномеров;
• сделать модели оптических дальномеров самостоятельно, применить их на практике, оценить точность их работы.
Методы:
• поиск информации по данной теме (книги, энциклопедии, журналы, информация из Интернета);
• изготовление моделей;
• проведение экспериментов;
• анализ результатов.
Новизна работы: созданы авторские модели дальномеров для изучения принципов дистанционных способов определения расстояния до объектов. Эти модели можно использовать в школьном эксперименте при изучении соответствующих тем, а также в системе дополнительного образования.
Объект исследования: методы определения расстояния до предметов.
Предмет исследования: устройства для измерения расстояния до объектов.
Гипотеза: существуют возможности создать прибор для дистанционного определения расстояния до объектов.
Практическая значимость работы: возможность сделать изучение тригонометрии и физики более интересным и наглядным.
Теоретическая часть
Расстояние, в широком смысле, – это степень удалённости объектов друг от друга. Расстояние является фундаментальным понятием геометрии.
Как мы видим окружающий мир
В природе огромное число видов живых существ не может нормально развиваться и жить без органов зрения. Сложное устройство глаз животных и человека, в сочетании с высокоразвитым мозгом, обеспечивает адекватное восприятие окружающего мира.
Глаза живых существ, выполняя одинаковую функцию зрения, иногда очень различаются по строению.
У травоядных, у птиц зрение осторожности – глаза расположены по обе стороны головы, как у кролика или у лошади. Это обеспечивает им почти круговой обзор и, соответственно, большую безопасность. А у хищника оба глаза направлены вперед (сова, волк, тигр). Это дает более точный «прицел» – для решающего прыжка или удара во время охоты, для корректировки траектории.
Люди уже давно заинтересовались тем, как мы видим мир. Древние египтяне считали, что из глаза исходят некие лучи, «осматривающие предмет», при этом источники света могут быть только внешние – например, пламя костра, свеча, солнечный свет. Любой объект – изображение на бумаге, солнечный зайчик от зеркала, любой предмет в природе, если он не нагрет до высокой температуры, мы видим в отраженном свете. То есть все предметы отражают часть попавшего на них света. Изображение, спроектированное на сетчатку, вызывает раздражение фоторецепторов, сигналы от которых обрабатываются и далее поступают в мозг, благодаря чему мы ощущаем некий образ.
Головной мозг получает два различных изображения, поступающих в него от каждого глаза, а воспринимает их как одно трёхмерное изображение. Несмотря на то, что изображение предметов на сетчатках глаз двумерное, человек видит мир трехмерным, то есть он может воспринимать глубины пространства стереоскопическим (стерео – от греч. stereos -твердый, пространственный) зрением. Бинокулярное зрение дает возможность воспринимать предметы объемно (пространственно) – ориентироваться на местности, координировать свои действия, например, при ходьбе, прыжках; управлять движением своим телом, полноценно участвовать во всех сферах деятельности – работе, учебе, спорте и т.д. Бинокулярное зрение формируется постепенно и достигает полного развития к 7–15 годам.
Виды дальномеров
Человеку, находящемуся на какой-либо местности, может понадобится возможность измерение расстояний до определенных объектов. Иногда расстояние до объекта не может быть измерено непосредственно, например, если ее конечные точки расположены на разных берегах широкой реки или с борта летательного аппарата и т.п. В таких случаях используют косвенные измерения, а процедуру измерения при этом называют определением неприступного расстояния. Такие измерения можно проводить «на глаз», но лучше и точнее можно провести с использованием специальных средств. Для облегчения подобных измерений используются приборы под названием дальномер [1].
Дальномерные приспособления делятся на активные и пассивные [2].
Активные дальномеры используют метод вычисления расстояния, используя время прохождения сгенерированного импульса до объекта и обратно. Они бывают звуковые, световые дальномер, лазерные и т.д.
В последнее время широкое распространение получили лазерные дальномеры, в частности лазерные рулетки. Рассмотрим, принцип их действия.
От прибора к объекту посылается зондирующий импульс лазерного излучателя, который запускает временной счетчик в дальномере. Когда отраженный объектом импульс возвращается к дальномеру, то он останавливает работу счетчика. По временному интервалу (задержке отраженного импульса), с помощью встроенного микропроцессора, определяется расстояние до объекта по формуле

где L – расстояние до объекта, с – скорость света; t – время прохождения импульса до цели и обратно.
Пассивные дальномеры используют геометрические или аналитические методы определения расстояния по полученному отраженному изображению. Бывают дальномеры, использующие оптический параллакс (например, дальномерный фотоаппарат), бывают дальномеры, использующие сопоставление объекта какому-либо образцу и др. Здесь уже используются геометрические вычисления для определения расстояния [4].
Использование геометрии для определения расстояния
Измерение расстояний пассивным оптическим дальномером основано на определении высоты h равнобедренного треугольника ABC, например, по известной стороне АВ = I (базе) и противолежащему острому углу [3]. Одна из величин, I обычно является постоянной, а другая – переменной (измеряемой). По этому признаку различают дальномеры с постоянным углом и дальномеры с постоянной базой.
Дальномер с постоянным углом представляет собой подзорную трубу с двумя параллельными нитями в поле зрения, а базой служит переносная рейка с равноотстоящими делениями. Измеряемое дальномером расстояние до базы пропорционально числу делений рейки, видимых в зрительную трубу между нитями. По такому принципу работают многие геодезические инструменты (теодолиты, нивелиры и др.). Относительная погрешность нитяного дальномера – 0,3–1 %.
Более сложные оптические дальномеры с постоянной базой, построены на принципе совмещения изображений объекта, построенными лучами, прошедшими различные оптические системы дальномера. Совмещение производится с помощью оптического компенсатора, расположенного в одной из оптических систем, а результат измерения прочитывается по специальной шкале. Монокулярные дальномеры с базой 3–10 см широко применяются в качестве фотографических дальномеров. Погрешность оптических дальномеров с постоянной базой достижима в менее 0,1 % от измеряемого расстояния.
Применение дальномеров
Первые дальномеры появились на военных кораблях британского флота (и в других странах) еще в 1905 году [6]. Выпускала их английская оптико-механическая фирма «Барр энд Струд». Тогда наибольшую известность и широкое использование на флоте получил «монокулярный дальномер». Посредством этого прибора можно было определить расстояние до цели с точностью до нескольких метров. Основанные на принципе «совмещения» изображения дальномеры фирмы «Барр энд Струд» выпускались с относительно небольшой базой, которая менялась в зависимости от определяемого расстояния. Наибольшее распространение на флоте получили дальномеры с базой три фута и шесть дюймов (1,07 м) и девять футов (2,74 м). Самый большой из них довольно точно измерял расстояние в 8000 ярдов (7280 м).
На «Луноходе-1» был установлен отражатель лазерного светодальномера, предназначенный для измерения расстояния до Луны (около 385 000 км) с точностью несколько метров. Во время полёта межпланетной станции «Венера-7» расстояние между Землёй и Венерой (свыше 60 млн. км) измерялось дальномерами с точностью до 1 км.
Наиболее широко дальномер применяется в геодезической практике. Его активно используют при строительстве дорог – автомобильных и железнодорожных. Также его применяют при прокладке линий электропередач, в военной сфере деятельности человека, в фотографировании, картографии, в туризме и спорте, в навигации, астрономии, в охоте и рыбалке [5].
Большое значение имеет использование дальномера в строительно-ремонтной области. Сегодня рулетку, линейку, карандаш удачно заменяет у строителей именно этот прибор.
Практическая часть
Я выбрала для изучения пассивный оптический дальномер с постоянной базой, так как он, на мой взгляд, более других подходит для моих целей.
Его принцип действия такой:
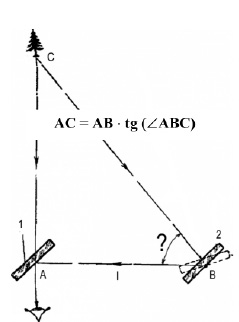
• изображение объекта в точке С (см. Приложение 1) будет проходить к наблюдателю в точке А через полупрозрачное зеркало 1, повернутое под углом 45°;
• в то же время, это же изображение попадет к наблюдателю через отдаленное на заданное (базисного) расстояние I зеркало 2 в точке В, отразившись от полупрозрачного зеркала 1;
• поскольку лучами зрения образовался прямоугольный треугольник, то при совпадении изображений, полученных по обоим путям, получим следующее:
 ;
;
Тогда
AC = AB tg (∠ABC).
Таким образом, расстояние от наблюдателя до объекта будет равно произведению базисного расстояния (между центрами полупрозрачного и поворотного зеркал) на тангенс угла поворота зеркала относительно продольной оси.
Построение модели №1, зеркальной
Процесс создания мною первой модели состоял из нескольких этапов (см.Приложение 2).
Из фанеры я изготовила короб, открытый с внешней стороны.
На нижнем основании короба с левой стороны я жестко закрепила полупрозрачное зеркало под углом 45° относительно продольной оси.
На противоположной стороне я установила зеркало на поворотном стержне. Расстояние между центрами зеркал составило 9 см.
Для удобства измерения я на верхней крышке короба наклеила круговую шкалу с указанием угла поворота в градусах.
В стенке короба, обращенной к наблюдателю я сделала отверстие напротив центра полупрозрачного зеркала. При наблюдении через это отверстие я увидела, что изображение раздваивается.
Я выбрала объект, удаленный на некоторое расстояние и совместила изображения, поворачивая зеркало. По меткам шкалы я определила угол поворота зеркала. Далее я повторила опыт, используя объекты, удаленные на другие расстояния. Измерения ближе 30 см. не удались в силу конструктивных особенностей модели.
По описанной ранее формуле я вычислила расстояние до объекта. Результат я занесла в таблицу, приведенную в Приложении 4.
В результате ошибка измерения составила в среднем 15 см., что составляет 8 %. Можно заметить, что ошибка тем меньше, чем ближе объект. Это объясняется тем, что при нахождении объекта вблизи дальномера, зеркало поворачивается на меньшие углы. Это и повышает точность. Конечно же погрешность измерений внесли свой вклад неточности в моей модели. Ведь тут очень важен каждый градус! Я частично компенсировала неточность измерения, увеличив длину указателя поворота зеркала.
Построение модели №2, лазерной
Я не остановилась на одном опыте. Моя вторая модель использует тот же тригонометрический принцип измерения, но вместо зеркал я решила использовать две лазерные указки.
Теперь для измерения требуется совместить на объекте две светящиеся точки от двух источников света.
Создание этой модели вышло значительно проще: потребовалось лишь создать широкое основание с поворотной платформой (см. Приложение 2). Одну указку я закрепила на основании, а вторую на поворотной платформе. Расстояние между центрами излучателей составило 8,5 см.
Для удобства измерения я около поворотной платформы наклеила круговую шкалу с указанием угла поворота в градусах.
Затем я провела ряд экспериментов, как и с предыдущей моделью. Результат я так же занесла в таблицу, приведенную в Приложении 4.
Ошибка измерения составила в среднем 8,55 см., что составляет 4 %.
Анализ результатов
Мне удалось создать практически действующие дальномеры.
Каждая из моделей дальномеров имеет свои достоинства и недостатки. Сравним их.
Таблица 1
Сравнение моделей дальномеров
|
Критерий сравнения |
Модель №1 (зеркальная) |
Модель №2 (лазерная) |
|
Простота изготовления |
- |
+ |
|
Простота в использовании |
+ |
+ |
|
Компактность |
- |
+ |
|
Ударопрочность |
- |
+ |
|
Точность измерения |
- |
+ |
|
Наглядность для демонстрации |
- |
+ |
|
Независимость от электропитания |
+ |
- |
|
Независимость от состояния атмосферы |
- |
- |
|
Возможность скрытного наблюдения |
+ |
- |
Таким образом, модель №2, с использованием, лазеров получила больше преимуществ, по сравнению с зеркальной моделью №1. Кроме того, что она вышла не только компактнее, проще в изготовлении, прочнее и нагляднее, но и почти в два раза точнее. В то же время ее работоспособность будет зависеть от наличия электропитания лазерных указок, и она не сможет обеспечить скрытного наблюдения за объектами, что может быть важно, например, для военных или охотников.
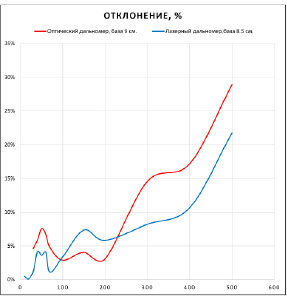
Оба дальномера имеют достаточно высокую точность измерения вблизи от объекта, и высокую погрешность при определении расстояния на значительном удалении. Это можно видеть на диаграмме, приведенной в Приложении 5. Снизить эту погрешность можно путем увеличения базового расстояния между осями наблюдения.
Выводы и заключение
Проведенные исследования позволяют сделать следующие выводы:
Из литературы я узнала, что для живых существ очень важно свойство определения расстояния. А уж для человека – тем более.
Ученые и изобретатели этой проблемой занимаются очень давно. Ими созданы два типа дальномеров: активные и пассивные. Каждый тип, в свою очередь, делится на виды устройств, в зависимости от применяемых технологий. Поэтому у них есть достоинства и недостатки, по сравнению друг с другом.
Для лучшего понимания принципов определения расстояния можно самому сделать модели дальномеров. Для этого понадобятся знания из школьных курсов тригонометрии и физики. На практике я проверила, что это возможно, и, что, точность моих дальномеров вполне подходит для большинства простых задач.
В дальнейшем эти модели дальномеров могут быть использованы для демонстрации правил геометрии и физических явлений учителями на уроках.
В перспективе я планирую заняться созданием моделей приборов, позволяющих определять не только расстояние до объектов, но и их размеры и прочие параметры.
В завершении я могу сказать, что моя гипотеза подтвердилась: действительно возможно создать приборы для дистанционного определения расстояния до объектов и сделать изучение тригонометрии и физики в школе более наглядным и интересным.
Приложения
Приложение 1
Схема тригонометрического метода определения расстояния
Приложение 2
Этапы создания и тестирования модели №1

Рис. 1. Изготовление деталей

Рис. 2. Сборка короба
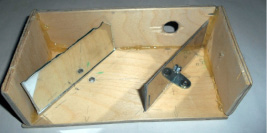
Рис. 3. Установка зеркал
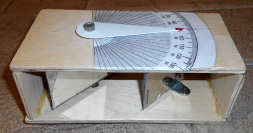
Рис. 4. Окончательная сборка. Вид сзади

Рис. 5. Окончательная сборка. Вид спереди
Рис. 6. Тест №1. Несовпадение изображения

Рис. 7. Тест №1. Совпадение изображения.

Рис. 8. Тест №2. Несовпадение изображения

Рис. 9. Тест №2. Совпадение изображения
Приложение 3
Этапы создания и тестирования модели №2
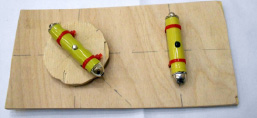
Рис. 10. Изготовление модели
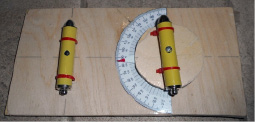
Рис. 11. Установка указателя поворота

Рис. 12. Тест №3. Размещение прибора и объекта

Рис. 13. Тест №3. Сведение лучей лазера на объекте
Приложение 4
Таблица измерения расстояния с помощью дальномера
|
Расстояние, см. |
Оптический дальномер, базис 9 см |
Лазерный дальномер, базис 8.5 см |
||||||
|
Угол, ° |
Рассто-яние, см. |
Откло-нение, см. |
Откло-нение, % |
Угол, ° |
Рассто-яние, см. |
Откло-нение, см. |
Откло-нение, % |
|
|
10 |
- |
- |
- |
- |
49,5° |
9,95 |
0,05 |
0 % |
|
15 |
- |
- |
- |
- |
60,5° |
15,02 |
0,02 |
0 % |
|
20 |
- |
- |
- |
- |
67,0° |
20,02 |
0,02 |
0 % |
|
30 |
74,0° |
31,39 |
1,39 |
5 % |
74,0° |
29,64 |
0,36 |
1 % |
|
40 |
78,0° |
42,34 |
2,34 |
6 % |
77,5° |
38,34 |
1,66 |
4 % |
|
50 |
80,5° |
53,78 |
3,78 |
8 % |
80,0° |
48,21 |
1,79 |
4 % |
|
60 |
82,0° |
64,04 |
4,04 |
7 % |
81,6° |
57,56 |
2,44 |
4 % |
|
70 |
83,0° |
73,30 |
3,30 |
5 % |
83,0° |
69,23 |
0,77 |
1 % |
|
100 |
85,0° |
102,87 |
2,87 |
3 % |
85,3° |
103,39 |
3,39 |
3 % |
|
150 |
86,7° |
156,09 |
6,09 |
4 % |
86,5° |
138,97 |
11,03 |
7 % |
|
200 |
87,5° |
206,13 |
6,13 |
3 % |
87,7° |
211,63 |
11,63 |
6 % |
|
300 |
88,5° |
343,70 |
43,70 |
15 % |
88,5° |
324,60 |
24,60 |
8 % |
|
400 |
88,9° |
468,73 |
68,73 |
17 % |
88,9° |
442,69 |
42,69 |
11 % |
|
500 |
89,2° |
644,54 |
144,54 |
29 % |
89,2° |
608,73 |
108,73 |
22 % |
|
1000 |
90,0° |
¥ |
- |
- |
90,0° |
¥ |
- |
- |
|
СРЕДНЕЕ |
15,75 |
8 % |
8,55 |
4 % |
||||
|
МАКСИМУМ |
144,54 |
29 % |
108,73 |
22 % |
||||
Приложение 5
Диаграмма погрешности измерения
Библиографическая ссылка
Чикирева Е.Д. ИСПОЛЬЗОВАНИЕ ТРИГОНОМЕТРИЧЕСКОГО МЕТОДА ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ. ДАЛЬНОМЕР // Международный школьный научный вестник. 2019. № 2-1. ;URL: https://school-herald.ru/ru/article/view?id=936 (дата обращения: 28.07.2026).